
Chin J Plan Ecolo ›› 2015, Vol. 39 ›› Issue (7): 694-703.DOI: 10.17521/cjpe.2015.0066
Special Issue: 遥感生态学
• Orginal Article • Previous Articles Next Articles
XU Zi-Qian1,2, CAO Lin1,2, RUAN Hong-Hua1,2,*( ), LI Wei-Zheng3, JIANG Sheng4
), LI Wei-Zheng3, JIANG Sheng4
Online:2015-07-01
Published:2015-07-22
Contact:
Hong-Hua RUAN
About author:# Co-first authors
XU Zi-Qian,CAO Lin,RUAN Hong-Hua,LI Wei-Zheng,JIANG Sheng. Inversion of subtropical forest stand characteristics by integrating very high resolution imagery acquired from UAV and LiDAR point-cloud[J]. Chin J Plan Ecolo, 2015, 39(7): 694-703.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.plant-ecology.com/EN/10.17521/cjpe.2015.0066
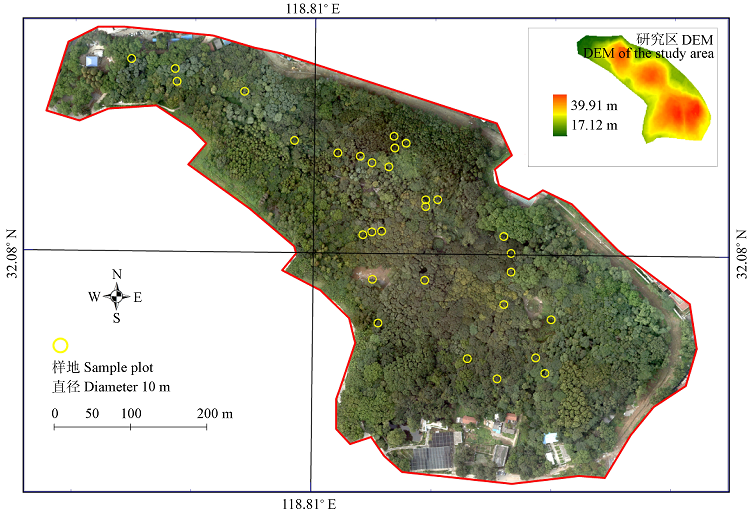
Fig. 1 UAV image of Niushan forest, with yellow circles showing the spatial locations of the sample plots. DEM, digital elevation model.
| 树种 Tree species | 公式 Formula | 备注 Remark |
|---|---|---|
| 杉木 Cunninghamia lanceolata | V = A × DB × (E × D + G × lgD)C | A = 0.000058777042, B = 1.9699831 C = 0.89646157, E = -2.2426 F = 0.2021, G = 6.6922 |
| 水杉 Metasequoia glyptostroboides | V = A × DB × ((E + F × e (G × D))H)C | A = 0.000058777042, B = 1.9699831 C = 0.89646157, E = 1.000438 F = -0.00024755, G = -0.07897864 H = 7101.252 |
| 侧柏 Platycladus orientalis | A = 0.000091972184, B = 1.8639778 C = 0.83156779, E = 1.000084 F = -0.0000671125, G = -0.1223273 H = 29416.66 | |
| 林分阔1 Broadleaf 1 (杨 Populus、栎 Quercus) | A = 0.000050479055, B = 1.9085054 C = 0.99076507, E = 0.9236004 F = 0.0502109, G = -0.09686479 H = -37.80742 | |
| 林分阔2 Broadleaf 2 (刺槐 Robinia pseudoacacia、刺桐Erythrina variegata、柳 Salix、杂 Other) | A = 0.000050479055, B = 1.9085054 C = 0.99076507, E = 6.569053 F = -4.565682, G = -0.03200782 H = 1.697762 |
Table 1 One-variable volume equation for stand volume in Jiangsu Province
| 树种 Tree species | 公式 Formula | 备注 Remark |
|---|---|---|
| 杉木 Cunninghamia lanceolata | V = A × DB × (E × D + G × lgD)C | A = 0.000058777042, B = 1.9699831 C = 0.89646157, E = -2.2426 F = 0.2021, G = 6.6922 |
| 水杉 Metasequoia glyptostroboides | V = A × DB × ((E + F × e (G × D))H)C | A = 0.000058777042, B = 1.9699831 C = 0.89646157, E = 1.000438 F = -0.00024755, G = -0.07897864 H = 7101.252 |
| 侧柏 Platycladus orientalis | A = 0.000091972184, B = 1.8639778 C = 0.83156779, E = 1.000084 F = -0.0000671125, G = -0.1223273 H = 29416.66 | |
| 林分阔1 Broadleaf 1 (杨 Populus、栎 Quercus) | A = 0.000050479055, B = 1.9085054 C = 0.99076507, E = 0.9236004 F = 0.0502109, G = -0.09686479 H = -37.80742 | |
| 林分阔2 Broadleaf 2 (刺槐 Robinia pseudoacacia、刺桐Erythrina variegata、柳 Salix、杂 Other) | A = 0.000050479055, B = 1.9085054 C = 0.99076507, E = 6.569053 F = -4.565682, G = -0.03200782 H = 1.697762 |
| 样地林分特征 Plot-level characteristics | 统计量 Statistics (n = 30) | |
|---|---|---|
| 变化范围 Range of variation | 平均值 Average | |
| Lorey’s树高 Lorey’s height (m) | 7.00-31.65 | 22.99 |
| 林分密度 Stand density (plant·hm-2) | 1 146-3 950 | 2 560 |
| 胸高断面积 Basal area (m2·hm-2) | 2.48-13.23 | 6.41 |
| 蓄积量 Volume (m3·hm-2) | 66.36-488.97 | 274.36 |
Table 2 Summary of plot-level characteristics
| 样地林分特征 Plot-level characteristics | 统计量 Statistics (n = 30) | |
|---|---|---|
| 变化范围 Range of variation | 平均值 Average | |
| Lorey’s树高 Lorey’s height (m) | 7.00-31.65 | 22.99 |
| 林分密度 Stand density (plant·hm-2) | 1 146-3 950 | 2 560 |
| 胸高断面积 Basal area (m2·hm-2) | 2.48-13.23 | 6.41 |
| 蓄积量 Volume (m3·hm-2) | 66.36-488.97 | 274.36 |
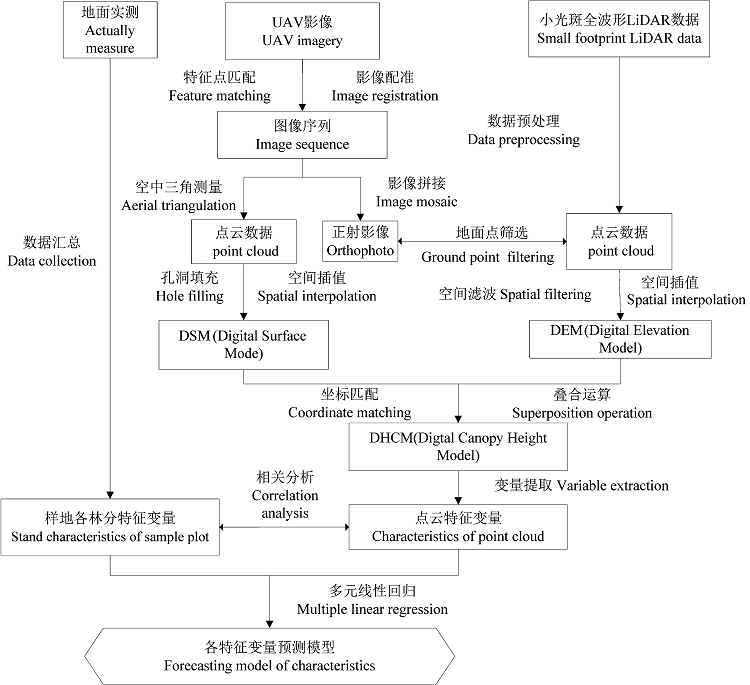
Fig. 2 Technical flow chart for this study.
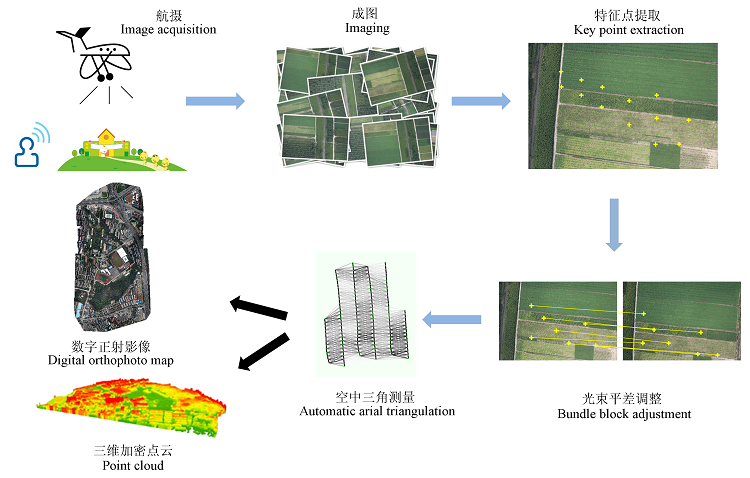
Fig. 3 Procedures for processing the UAV data.
| 自变量(归一化点云提取参数) Independent variable | 因变量(实测参数) Dependent variable |
|---|---|
| 高度分位数 Height percentile (h10, h25, h30, h40, h60, h75, h85, h90) | Lorey’s树高 Lorey’s height (m) 林分密度 Stand density (plant·hm-2) 胸高断面积 Basal area (m2·hm-2) 蓄积量 Volume (m3·hm-2) |
| 点云密度变量 Point cloud density variables (d10, d25, d30, d40, d60, d75, d85, d90) | |
| 高度均值 Average height (havg) 高度最值 Maximum/minimal height (hmax, hmin) |
Table 3 List of independent variables for this study
| 自变量(归一化点云提取参数) Independent variable | 因变量(实测参数) Dependent variable |
|---|---|
| 高度分位数 Height percentile (h10, h25, h30, h40, h60, h75, h85, h90) | Lorey’s树高 Lorey’s height (m) 林分密度 Stand density (plant·hm-2) 胸高断面积 Basal area (m2·hm-2) 蓄积量 Volume (m3·hm-2) |
| 点云密度变量 Point cloud density variables (d10, d25, d30, d40, d60, d75, d85, d90) | |
| 高度均值 Average height (havg) 高度最值 Maximum/minimal height (hmax, hmin) |
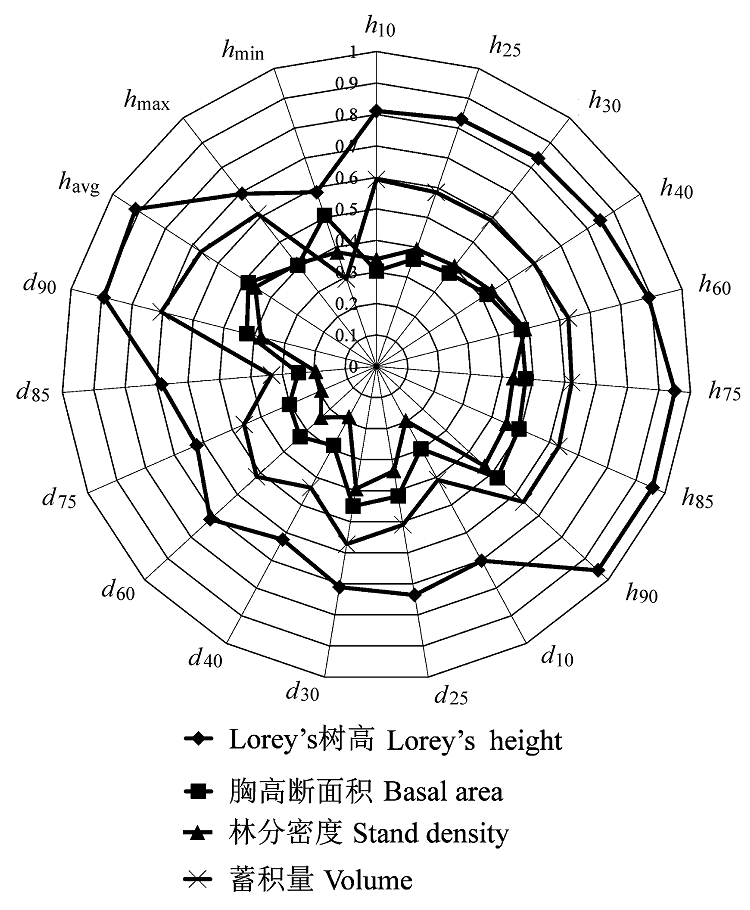
Fig. 4 Analysis of coefficients between point-cloud metrics and stand characteristics. h10, h25…h90, height percentile; havg, average height; hmax, maximum height; hmin, minimal height; d10, d25… d90, point cloud density.
| 林分特征变量 Stand characteristics | 联合提取估算模型 Combined extraction estimation models | R2 | RMSE | rRMSE (%) |
|---|---|---|---|---|
| Lorey’s树高 Lorey’s height (H)(m) | H = 0.23 + 0.579havg + 0.346h90 | 0.86 | 0.13 | 6.47 |
| 林分密度 Stand density (N)(plant·hm-2) | N = 596.552 + 414.135h60 - 346.586h30 | 0.29 | 0.69 | 27.04 |
| 胸高断面积 Basal area (G)(m2·hm-2) | lnG = 2.752lnh60 - 1.841lnh10 - 1.126 | 0.53 | 0.28 | 16.38 |
| 蓄积量 Volume (V)(m3·hm-2) | lnV = 2.499 + 1.429lnh90 + 0.7lnd90 | 0.59 | 0.40 | 6.93 |
Table 4 The integrated models and their accuracy assessments
| 林分特征变量 Stand characteristics | 联合提取估算模型 Combined extraction estimation models | R2 | RMSE | rRMSE (%) |
|---|---|---|---|---|
| Lorey’s树高 Lorey’s height (H)(m) | H = 0.23 + 0.579havg + 0.346h90 | 0.86 | 0.13 | 6.47 |
| 林分密度 Stand density (N)(plant·hm-2) | N = 596.552 + 414.135h60 - 346.586h30 | 0.29 | 0.69 | 27.04 |
| 胸高断面积 Basal area (G)(m2·hm-2) | lnG = 2.752lnh60 - 1.841lnh10 - 1.126 | 0.53 | 0.28 | 16.38 |
| 蓄积量 Volume (V)(m3·hm-2) | lnV = 2.499 + 1.429lnh90 + 0.7lnd90 | 0.59 | 0.40 | 6.93 |
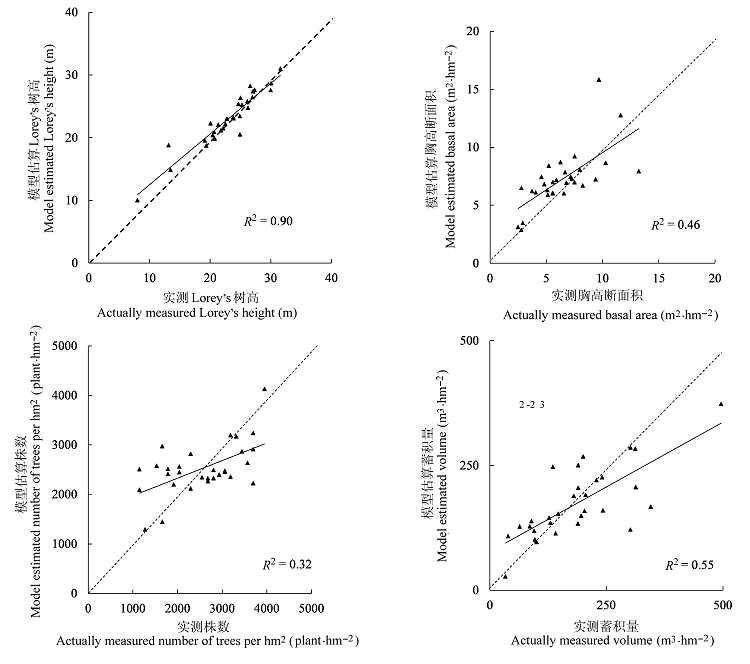
Fig. 5 Comparison of field-measured characteristics and the estimates from model (the dotted line is 1:1 validation line).
| [1] | Azzari G, Goulden ML, Rusu RB (2013). Rapid characterization of vegetation structure with a microsoft kinect sensor.Sensors, 13, 2384-2398. |
| [2] | Cao L, Dai JS, Xu JX, Xu ZQ, She GH (2014). Optimized extraction of forest parameters in subtropical forests based on airborne small footprint LiDAR technology.Journal of Beijing Forestry University, 36(5), 13-21. |
| (in Chinese with English abstract) [曹林, 代劲松, 徐建新, 许子乾, 佘光辉 (2014). 基于机载小光斑 LiDAR 技术的亚热带森林参数信息优化提取. 北京林业大学学报, 36(5), 13-21.] | |
| [3] | Cao L, She GH, Dai JS, Xu JX (2013). Status and prospects of the LiDAR-based forest biomass estimation. Journal of Nanjing Forestry University (Natural Sciences Edition), 37(3), 163-169. |
| (in Chinese with English abstract) [曹林, 佘光辉, 代劲松, 徐建新 (2013). 激光雷达技术估测森林生物量的研究现状及展望. 南京林业大学学报(自然科学版), 37(3), 163-169.] | |
| [4] | Dandois JP, Ellis EC (2013). High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision.Remote Sensing of Environment, 136, 259-276. |
| [5] | Duncanson L, Niemann KO, Wulder M (2010). Integration of GLAS and Landsat TM data for aboveground biomass estimation.Canadian Journal of Remote Sensing, 36, 129-141. |
| [6] | Fu T, Pang Y, Huang QF, Liu QW, Xu GC (2011). Prediction of subtropical forest parameters using airborne laser scanner.Journal of Remote Sensing, 15, 1092-1104. |
| (in Chinese with English abstract) [付甜, 庞勇, 黄庆丰, 刘清旺, 徐光彩 (2011). 亚热带森林参数的机载激光雷达估测. 遥感学报, 15, 1092-1104.] | |
| [7] | Harwin S, Lucieer A (2012). Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery.Remote Sensing, 4, 1573-1599. |
| [8] | He QS, Chen EX, Cao CX, Liu QW, Pang Y (2009). A study of forest parameters mapping technique using airborne LIDAR data.Advances in Earth Science, 24, 749-755. |
| (in Chinese with English abstract) [何祺胜, 陈尔学, 曹春香, 刘清旺, 庞勇 (2009). 基于LIDAR数据的森林参数反演方法研究. 地球科学进展, 24, 748-755.] | |
| [9] | Jiang XJ, Song ZF, Wu QH (2010). Conversion method between local independent coordinate system and WGS-84 coordinate system as well as its applications.Railway Investigation and Surveying, 36(4), 8-10, 13. |
| (in Chinese with English abstract) [蒋小军, 宋占峰, 吴清华(2010). 地方独立坐标系与WGS-84坐标系转换方法及应用. 铁道勘察, 36(4), 8-10, 13.] | |
| [10] | Lefsky MA, Cohen WB, Spies TA (2001). An evaluation of alternate remote sensing products for forest inventory, monitoring, and mapping of Douglas-fir forests in western Oregon.Canadian Journal of Forest Research, 31, 78-87. |
| [11] | Li DR, Wang CW, Hu YM, Liu SG (2012). General review on remote sensing-based biomass estimation.Geomatics and Information Science of Wuhan University, 37, 631-635. |
| (in Chinese with English abstract) [李德仁, 王长委, 胡月明, 刘曙光 (2012). 遥感技术估算森林生物量的研究进展. 武汉大学学报(信息科学版), 37, 631-635.] | |
| [12] | Liu DQ, Fan WY, Li MZ (2012). Estimation of forest stand parameters and biomass by small-footprint LIDAR.Journal of Northeast Forestry University, 40(1), 39-43. |
| (in Chinese with English abstract) [刘东起, 范文义, 李明泽 (2012). 利用小光斑激光雷达估测林分参数和生物量. 东北林业大学学报, 40(1), 39-43.] | |
| [13] | Lucieer A, Turner D, King DH, Robinson SA (2014). Using an Unmanned Aerial Vehicle (UAV) to capture micro- topography of Antarctic moss beds.International Journal of Applied Earth Observation and Geoinformation, 27, 53-62. |
| [14] | Mathews AJ, Jensen JLR (2013). Visualizing and quantifying vineyard canopy LAI using an Unmanned Aerial Vehicle (UAV) collected high density structure from motion point cloud.Remote Sensing, 5, 2164-2183. |
| [15] | Morgenroth J, Gomez C (2014). Assessment of tree structure using a 3D image analysis technique—A proof of concept.Urban Forestry & Urban Greening, 13, 198-203. |
| [16] | Næsset E (2002). Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data.Remote Sensing of Environment, 80, 88-99. |
| [17] | Pang Y, Li ZY (2012). Inversion of biomass components of the temperate forest using airborne Lidar technology in Xiaoxing’an Mountains, Northeastern of China.Chinese Journal of Plant Ecology, 36, 1095-1105. |
| (in Chinese with English abstract) [庞勇, 李增元 (2012). 基于机载激光雷达的小兴安岭温带森林组分生物量反演. 植物生态学报, 36, 1095-1105.] | |
| [18] | Pang Y, Li ZY, Chen EX, Sun GQ (2005). Lidar remote sensing technology and its application in forestry.Scientia Silvae Sinicae, 41(3), 129-136. |
| (in Chinese with English abstract) [庞勇, 李增元, 陈尔学, 孙国清 (2005). 激光雷达技术及其在林业上的应用. 林业科学, 41(3), 129-136.] | |
| [19] | Popescu SC (2007). Estimating biomass of individual pine trees using airborne LiDAR.Biomass and Bioenergy, 31, 646-655. |
| [20] | Turner D, Lucieer A, Watson C (2012). An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery based on Structure from Motion (SFM) point clouds.Remote Sensing, 4, 1392-1410. |
| [21] | Wallace L, Lucieer A, Watson C, Turner D (2012). Development of a UAV-LiDAR system with application to forest inventory.Remote Sensing, 4, 1519-1543. |
| [22] | Westoby MJ, Brasington J, Glasser NF, Hambrey MJ, Reynolds JM (2012). ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications.Geomorphology, 179, 300-314. |
| [23] | Wulder MA, White JC, Stinson G, Hilker T, Kurz WA, Coops NC, St-Onge B, Trofymow JA (2010). Implications of differing input data sources and approaches upon forest carbon stock estimation.Environmental Monitoring and Assessment, 166, 543-561. |
| [24] | Xu SQ, Zhang XF, Zhou KF, Zhao TY (2007). Discussion of the seven-parameter coordinate transformation between WGS-84 and BJ-54.Geomatics & Spatial Information Technology, 30(5), 33-38, 42. |
| (in Chinese with English abstract) [徐仕琪, 张晓帆, 周可法, 赵同阳 (2007). 关于利用七参数法进行WGS-84和BJ-54坐标转换问题的探讨. 测绘与空间地理信息, 30(5), 33-38, 42.] | |
| [25] | Zarco-Tejada PJ, Diaz-Varela R, Angileri V, Loudjani P (2014). Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods.European Journal of Agronomy, 55, 89-99. |
| [26] | Zhao F (2007). Forest Parameter Extraction Using LiDAR Data and Digital Camera Image. PhD dissertation, Chinese Academy of Forestry, Beijing. |
| (in Chinese) [赵峰 (2007). 机载激光雷达数据和数码相机影像林木参数提取研究. 博士学位论文. 中国林业科学研究院, 北京.] |
| [1] | LIU Bing-Bing, WEI Jian-Xin, HU Tian-Yu, YANG Qiu-Li, LIU Xiao-Qiang, WU Fa-Yun, SU Yan-Jun, GUO Qing-Hua. Validation and uncertainty analysis of satellite remote sensing products for monitoring China’s forest ecosystems—Based on massive UAV LiDAR data [J]. Chin J Plant Ecol, 2022, 46(10): 1305-1316. |
| [2] | GUO Qing-Hua, HU Tian-Yu, MA Qin, XU Ke-Xin, YANG Qiu-Li, SUN Qian-Hui, LI Yu-Mei, SU Yan-Jun. Advances for the new remote sensing technology in ecosystem ecology research [J]. Chin J Plant Ecol, 2020, 44(4): 418-435. |
| [3] | XU Ting,CAO Lin,SHEN Xin,SHE Guang-Hui. Estimates of subtropical forest biomass based on airborne LiDAR and Landsat 8 OLI data [J]. Chin J Plan Ecolo, 2015, 39(4): 309-321. |
| [4] | PANG Yong, LI Zeng-Yuan. Inversion of biomass components of the temperate forest using airborne Lidar technology in Xiaoxing’an Mountains, Northeastern of China [J]. Chin J Plant Ecol, 2012, 36(10): 1095-1105. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Copyright © 2022 Chinese Journal of Plant Ecology
Tel: 010-62836134, 62836138, E-mail: apes@ibcas.ac.cn, cjpe@ibcas.ac.cn