徐婷, 曹林, 申鑫, 佘光辉
南京林业大学南方现代林业协同创新中心, 南京 210037
XU Ting, CAO Lin, SHEN Xin, SHE Guang-Hui
通讯作者:
收稿日期: 2014-10-11
接受日期: 2015-02-15
网络出版日期: 2015-04-01
版权声明: 2015 植物生态学报编辑部 本文是遵循CCAL协议的开放存取期刊,引用请务必标明出处。
基金资助:
展开
摘要
快速、定量、精确地估算区域森林生物量一直是森林生态功能评价以及碳储量研究的重要问题。该研究基于机载激光雷达(LiDAR)点云与Landsat 8 OLI多光谱数据, 借助江苏省常熟市虞山地区55块调查样地数据, 首先提取并分析了87个特征变量(53个OLI特征变量, 34个LiDAR特征变量)与森林地上、地下生物量的Pearson’s相关系数以进行变量优选, 然后利用多元逐步回归法建立森林生物量估算模型(OLI生物量估算模型和LiDAR生物量估算模型), 并与基于两种数据建立的综合生物量估算模型的结果进行比较, 讨论预测结果及其精确性。结果表明: 3种模型(OLI模型、LiDAR模型和综合模型)在所有样地无区分分析时, 地上和地下生物量的估算精度均达到0.4以上, 基于不同森林类型(针叶林、阔叶林、混交林)分析时地上和地下生物量的估算精度均有明显提高, 达到0.67及以上。利用分森林类型模型估算生物量, 综合生物量估算模型精度(地上生物量: R2为0.88; 地下生物量: R2为0.92)优于OLI生物量估算模型(地上生物量: R2为0.73; 地下生物量: R2为0.81)和LiDAR生物量估算模型(地上生物量: R2为0.86; 地下生物量: R2为0.83)。
关键词:
Abstract
Estimating forest biomass at regional scale with high accuracy is among the pressing challenges in evaluating ecosystem functions and characteristics (e.g., carbon storage).
This study is based on airborne small-footprint discrete-return LiDAR data, Landsat 8 OLI multispectral data, and in situ measurements from 55 forest plots in Yushan, Changshu, Jiangsu Province. A total of 87 independent variables (53 from OLI metrics and 34 from LiDAR metrics) were used in the Pearson correlation analysis for estimating aboveground (WA) and belowground (WB) biomass by identifying the significant independent variables. Three independent models by using OLI, LiDAR and their combinations (i.e., the combo model) were established through stepwise regression analysis.
The correlation coefficients of determination (R2) for WA and WB models are greater than 0.4. The R2 seemed much higher when the estimations were type-specific (e.g., coniferous, broad-leaf and mixed forest), with R2 of >0.67. The Combo model by forest type yielded an R2 of 0.88 for WA and 0.92 for WB, while the OLI-based model had R2 of 0.73 and 0.81 for WA and WB, respectively. The LiDAR-based model has R2 of 0.86 and 0.83 for WA and WB, respectively.
Keywords:
森林生态系统是陆地生物圈的主体, 其生物量约占整个陆地生态系统的85% (方精云等, 2002), 森林储存了80%的地表碳及40%的地下碳, 而森林碳储量的大小与森林生物量直接相关(张志等, 2011), 森林生物量在减缓全球气候变化中具有不可替代的作用(Post et al., 1982)。亚热带树种丰富且森林生产力高, 不仅对区域生态环境有很大影响, 而且对维持全球碳平衡也具有重要作用(Cao et al., 2014b)。传统的生物量调查方法耗时费力, 且只能获得有限的“点”上信息(曹林等, 2014)。而遥感技术能够准确、快速地获取各个尺度的森林参数(董立新, 2008; 马利群和李爱农, 2011), 在森林资源动态监测及森林碳储量定量估算方面具有重要作用。
Landsat系列卫星已获取了42年的对地连续观测数据, 可获取中等和大尺度上的森林资源信息。其最新的Landsat 8 OLI传感器在波段的设置及对植被的敏感性上比之前的TM等传感器有较大提升(徐涵秋和唐菲, 2013)。然而光学遥感仍难以穿透森林冠层获得其垂直结构信息, 且在森林覆盖度高(植被生长旺盛)的区域获取森林生物量信息时易饱和。激光雷达(LiDAR)是近年来迅速发展的主动遥感技术, 其发射的激光脉冲可以穿透植被冠层获得其三维结构和能量信息(Lefsky et al., 2002)。以往研究表明LiDAR在精确估算不同森林类型的生物物理和结构特性方面具有较大潜力(Dubayah & Drake, 2000)。针对多光谱影像与LiDAR数据各自的特性, 将两者信息综合并应用于森林参数提取已成为当前研究的热点。Popescu等(2004)融合小光斑LiDAR数据和多光谱数据进行小样区水平的材积和生物量的估测, 结果表明融合数据比仅用LiDAR数据进行森林参数估测精度高; Guo等(2010)利用环境卫星多光谱数据和ICESat/GLAS波形数据, 以塔河林场为研究区反演了地上生物量, 结果表明80%的验证点生物量误差在20 t·hm-2以内。但以上研究大多只涉及郁闭度、地上生物量, 而对地下生物量的反演和对Landsat 8 OLI新特性的发掘少。
本文以江苏南部丘陵地区的北亚热带天然次生林为研究对象, 借助Landsat 8 OLI多光谱数据和机载小光斑LiDAR数据, 首先对2种数据进行了预处理, 然后分别提取特征变量并进行敏感性分析实现变量优选, 最后结合地面实测的典型森林类型样地数据构建了3种地上和地下生物量反演模型(即OLI生物量估算模型、LiDAR生物量估算模型以及综合生物量估算模型); 其次, 每个模型又根据是否分森林类型分为所有样地无区分分析模型(地上和地下)、针叶林模型(地上和地下)、阔叶林模型(地上和地下)和混交林模型(地上和地下), 最后比较分析其估算精度(技术路线见图1)。
图1 基于小光斑离散点云LiDAR和OLI多光谱数据估算森林生物量技术路线图。
Fig. 1 Methodological flowchart for estimating forest biomass using small-footprint discrete-return LiDAR data and OLI multispectral data. DTM, digital terrain model; WA, above-ground biomass; WB, below-ground biomass.
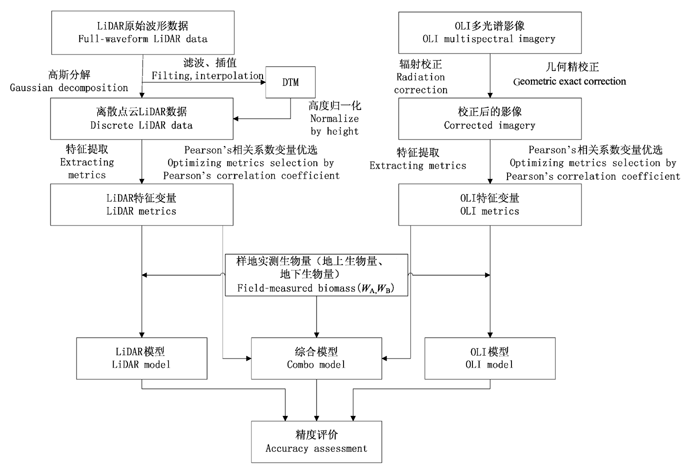
研究区位于江苏省常熟市国营虞山林场(120.70° E, 31.67° N), 面积约1103 hm2, 海拔高度为20-261 m。属亚热带季风气候, 气候温和, 平均年降水量1054 mm。虞山林场属于北亚热带次生混交林, 主要森林类型为针叶林、阔叶林和混交林, 其中主要针叶树种有马尾松(Pinus massoniana)、杉木(Cunninghamia lanceolata)、湿地松(Pinus elliottii)和黑松(Pinus thunbergii)等; 主要阔叶树种有麻栎(Quercus acutissima)、枫香(Liquidambar formosana)及部分常绿阔叶树种, 如壳斗科植物、樟科植物和山茶科植物。研究区及样地分布见图2。
图2 研究区真彩色航空像片及55块样地分布图。
Fig. 2 Aerial photo of the study site and distribution of 55 sampling plots.
根据历史调查数据(1995, 2012)中的森林类型、年龄和立地指数等指标在研究区范围内设置55个方形样地(30 m × 30 m, 设置时间: 2012年7-8月及2013年8月)。根据树种组成比例将样地划分为针叶林(n = 13)、阔叶林(n = 16)和混交林(n = 26) 3种类型。样地调查过程中, 对于胸径大于5 cm的树木, 逐一测定单木的树种、胸径(用围尺测量)、树高和枝下高(利用Vertex IV激光测高器测量)以及冠幅(即两个主方向上的投影距离, 用皮尺测量), 对于胸径小于5 cm的树木和枯死木进行计数, 但不参与生物量的计算。样地西南角坐标使用差分GPS (Trimble GeoXH6000, Trimble, Sunnyvale, USA)测定, 通过接收JSCORS广域差分信号定位, 精度优于0.5 m。
根据单木调查数据汇总样地尺度的相关森林参数, 包括每块样地单位面积的胸高断面积(m3·hm-2); 胸高断面积加权的平均树高(Lorey’s mean height, 即以单木胸高断面积为权重汇总的样地平均高); 样地尺度上的单位面积地上、地下生物量(t·hm-2)。生物量信息通过异速生长方程(遵从就近原则)计算单木的生物量, 并汇总得到每块样地的单位面积地上生物量(WA)和地下生物量(WB)(冯宗炜等, 1999)。3种森林类型样地生物量信息汇总于表1。
表1 地面调查样地信息汇总
Table 1 Summary of the forests from field sampling plots
| 森林参数 Forest metrics | 针叶林 Coniferous forest (n = 13) | 阔叶林 Broad-leaf forest (n = 16) | 混交林 Mixed forest (n = 26) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 数值范围 Range | 平均值 Mean | 标准偏差 SD | 数值范围 Range | 平均值 Mean | 标准偏差 SD | 数值范围 Range | 平均值 Mean | 标准偏差 SD | |
| 地上生物量 WA (t·hm-2) | 47.66-102.76 | 76.52 | 18.44 | 32.03-151.45 | 91.02 | 31.74 | 49.65-192.22 | 87.28 | 28.22 |
| 地下生物量 WB (t·hm-2) | 14.42-32.59 | 22.81 | 5.34 | 10.31-37.39 | 26.27 | 6.08 | 15.69-61.89 | 25.82 | 8.41 |
研究采用2013年7月19日的Landsat 8 OLI影像(条带号119/38)中的2-7波段, 影像空间分辨率为30 m, 辐射分辨率为12 bit, 光谱范围覆盖11个波段。首先借助OLI传感器的辐射定标参数对原始影像进行辐射定标。将原始影像灰度值(DN值)转化为像元辐射亮度值。再以FLAASH模型对影像进行大气校正(大气模型: Tropical; 气溶胶模型: Urban; 气溶胶反演法: 2-Band (K-T); 初始能见度: 40; 波谱响应函数: ldcm_oli.sli), 从而将辐射亮度值转化为地表实际反射率。然后对影像进行几何精校正, 选取40个同名地物点, 采用二次多项式进行校正, 校正误差控制在0.1个像元以内, 并采用最邻近像元法进行重采样。
研究采用Riegl LMS-Q680i LiDAR传感器(RIEGL, Horn, Austria)获取数据(2013年8月17日)。激光传感器的脉冲发射频率为400 kHz (扫描角±30°), 遥感平台的飞行高度900 m, 旁向重叠度≥60%, 平均点距为0.74 m。传感器记录了完整的全波形信息, 通过高斯分解方法获得离散点云信息(RIEGL, Horn, Austria)。每个激光返回点内包含三维坐标值(x, y, z)、强度值(intensity)和返回类型(return type)等信息。离散点云LiDAR数据最终均以LAS 1.3格式保存。
首先将离散点云回波点分成地面点和非地面点, 去除地面以上的回波点(Kraus and Pfeifer算法)(Kraus & Pfeifer, 1998), 然后基于地面点计算每个像元内激光点的平均高程生成数字高程模型(DEM), 再利用DEM对植被回波点的高程进行归一化处理, 即使植被点的高度值转化为相对于地面的高度值, 并通过左下角和右上角的坐标对每块样地进行裁切(Cao et al., 2014a)。最后通过GIS分析工具提取55个样地对应坐标位置的归一化点云数据。
1.5.1 OLI特征变量
通过对OLI影像进行波段组合、缨帽变换、纹理信息提取、主成分分析、最小噪声分离变换以及多种植被指数变换, 提取5组(共53个)特征变量, 6个原始单波段变量、10个波段组合变量、10个信息增强组变量、18个植被指数变量以及9个纹理信息变量, 其中纹理分析针对主成分分析的第一主成分进行, 窗口大小为3 × 3, 滞后距离为1个像元。53个变量的含义及计算公式见附录1。
附录1 OLI特征变量汇总
Appendix 1 Summary of metrics computed from OLI multispectral data
| 特征变量 Metrics | 变量描述 Description |
|---|---|
| 原始单波段 Initial bands | |
| B2-B7 | OLI第2-7波段(经过大气校正和几何精校正) Second to seventh band from OLI (after atmospheric correction and geometric exact correction) |
| 波段组合 Band combination | |
| Albedo | Albedo = B2 + B3 + B4 + B5 + B6 + B7 |
| B4/Albedo | B4/Albedo = B4 / (B2 + B3 + B4 + B5 + B6 + B7) |
| B24 | B24 = B2 / B4 |
| B74 | B74 = B7 / B4 |
| B76 | B76 = B7 / B6 |
| B547 | B547 = B5 · B4 / B7 |
| B65 | B65 = B6 / B5 |
| B345 | B345 = B3 · B4 / B5 |
| B53 | B53 = B5 / B3 |
| VIS234 | VIS234 = B2 + B3 + B4 |
| 信息增强组 Information enhance | |
| 绿度 Greenness (TCG) | 提取缨帽变换绿度波段 Extract greenness from tasseled cap transform |
| 亮度 Brightness (TCB) | 提取缨帽变换亮度波段 Extract brightness from tasseled cap transform |
| 湿度 Wetness (TCW) | 提取缨帽变换湿度波段 Extract wetness from tasseled cap transform |
| 第一主成分 First principal component (PC1) | 提取主成分分析第一波段 Extract first band from principal component analysis |
| 第二主成分 Second principal component (PC2) | 提取主成分分析第二波段 Extract second band from principal component analysis |
| 第三主成分 Third principal component (PC3) | 提取主成分分析第三波段 Extract third band from principal component analysis |
| 最小噪声分离变换第一波段 First band of minimum noise fraction rotation (MNF1) | 提取MNF变换第一波段 Extract first band from minimum noise fraction rotation |
| 最小噪声分离变换第二波段 Second band of minimum noise fraction rotation (MNF2) | 提取MNF变换第二波段 Extract second band from minimum noise fraction rotation |
| 最小噪声分离变换第三波段 Third band of minimum noise fraction rotation (MNF3) | 提取MNF变换第三波段 Extract third band from minimum noise fraction rotation |
| 最小噪声分离变换第四波段 Forth band of minimum noise fraction rotation (MNF4) | 提取MNF变换第四波段 Extract forth band from minimum noise fraction rotation |
| 植被指数 Vegetation index | |
| 增强型植被指数 Enhanced vegetation index (EVI) |  |
| 归一化植被指数 Normalized difference vegetation index (NDVI) |  |
| 土壤调整植被指数 Soil-adjusted vegetation index (SAVI) |  |
| 有效叶面积指数 Specific leaf area vegetation index (SLAVI) |  |
| 简单比值植被指数 Ratio vegetation index (RVI) |  |
| 中红外植被指数 Mid-infrared vegetation index (VI3) |  |
| 垂直植被指数 Perpendicular vegetation index (PVI) |  |
| 土壤调整比值植被指 Soil-adjusted ratio vegetation index (SARVI) |  |
| 差值植被指数 Difference vegetation index (DVI) |  |
| 转换型植被指数 Transformed normalized difference vegetation index (TNDVI) |  |
| 大气阻抗植被指数 Atmospherically resistant vegetation index (ARVI) |  |
| 修正型土壤调整植被指数 Modified soil-adjusted vegetation index (MSAVI) |  |
| 修正型简单比值植被指数 Modified simple ratio vegetation index (MSR) |  |
| 非线性指数 Nonlinear index (NLI) |  |
| 重归一化植被指数 Renormalized difference vegetation index (RDVI) |  |
| 归一化植被指数 Normalized difference vegetation index (ND43) |  |
| 归一化植被指数 Normalized difference vegetation index (ND67) |  |
| 归一化植被指数 Normalized difference vegetation index (ND563) |  |
| 纹理信息 Texture information | |
| 相关度 Correlation (CR) |  |
| 对比度 Contrast (CO) |  |
| 相异性 Dissimilarity (DI) |  |
| 信息熵 Entropy (EN) |  |
| 均匀度 Homogeneity (HO) |  |
| 均值 Mean (ME) |  |
| 二阶矩 Second moment (SM) |  |
| 偏斜度 Skewness (SK) |  |
| 方差 Variance (VA) | 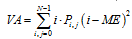 |
1.5.2 LiDAR特征变量
LiDAR特征变量是基于三维归一化LiDAR点云值计算了4组(34个)特征变量: 10个高度变量、13个高度百分位数变量、10个冠层密度变量、1个冠层覆盖度变量。34个变量的含义及计算公式见附录2。
附录2 LiDAR特征变量汇总
Appendix 2 Summary of metrics computed from LiDAR
| 特征变量 Metrics | 变量描述 Description |
|---|---|
| 高度百分位数 Percentile height | |
| h10, h20, h25, h30, h40, h50, h60, h70, h75, h80, h90, h95, h99 | 第一回波返回点的冠层高度分布百分位数(10th, 20th, 25th, 30th, 40th, 50th, 60th, 70th, 75th, 80th, 90th, 95th, 99th) The percentiles of the canopy height distributions (10th, 20th,…99th) of first returns |
| 高度变量 Height metrics | |
| hmin | 激光雷达树高的最小值 Minimum height above ground of all first returns |
| hskew | 激光雷达树高的偏斜度 Skewness of heights of all first returns |
| hkur | 激光雷达树高的峰度 Kurtosis of heights of all first returns |
| hiq | 激光雷达树高的75%和25%分位数的差值 Difference between 75% and 25% of canopy height of first returns |
| hmean | 激光雷达树高的平均值 Mean height above ground of all first returns |
| hmax | 激光雷达树高的最大值 Maximum height above ground of all first returns |
| hcv | 激光雷达树高的高度变异系数 Coefficient of variation of heights of all first returns |
| hmode | 激光雷达树高的众数 Mode of heights of all first returns |
| hvar | 激光雷达树高的方差 Variance of heights of all first returns |
| hstd | 激光雷达树高的标准差 Standard deviation of heights of all first returns |
| 冠层密度 Canopy density | |
| d0, d1, d2, d3, d4, d5, d6, d7, d8, d9 | 高于一定范围相对高度的冠层返回密度, 即第一回波中高于(0、10、20、…90)分位数的点占第一回波所有点的百分比(0-100%) The canopy return density over a range of relative heights, i.e., percentage (0%-100%) of first returns above the quantiles (0, 10, 20…90) to total number of first returns |
| 覆盖度 Cover | |
| c | 取高于2 m的冠层返回点在所有激光返回点中所占的比例 Percentages of first returns above 2 m |
1.5.3 特征变量优化提取
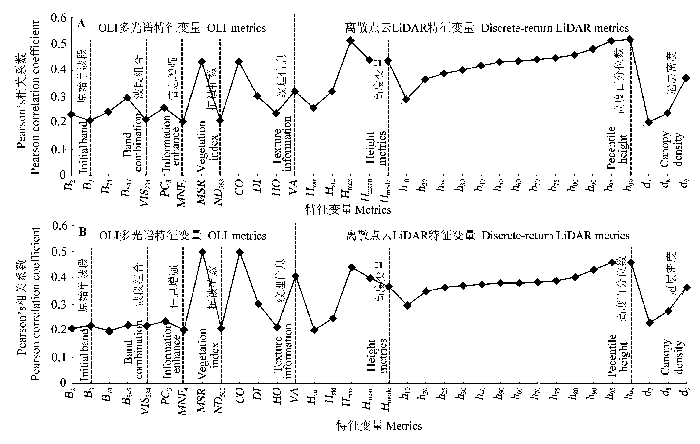
将提取的共87个(34个LiDAR特征变量及53个OLI特征变量)变量与需要预测的参数进行Pearson相关性分析, 选取Pearson’s相关系数的绝对值高于0.2的特征变量作为建模候选变量。研究选出了34个候选变量, 这些候选变量及其与需要预测的参数的Pearson’s相关系数的绝对值如图3所示。可以看出, OLI特征变量中, 纹理信息与生物量的相关性较高。具体来看, 纹理信息对比度(contrast, CO)以及植被指数中的修正型简单比值植被指数(modified simple ratio vegetation index, MSR)与所需估测的森林参数之间的Pearson’s相关系数最高。LiDAR特征变量中, 高度变量和高度百分位数与生物量的相关性较高。这34个变量与生物量的Pearson’s相关系数较高且关系显著, 说明它们之间有较好的线性关系。因此把这34个特征变量作为最终建模候选变量。
图3 特征变量与样地地上生物量(A)和地下生物量(B) Pearson’s相关系数。各特征变量的含义及计算公式见附录。
Fig. 3 Pearson correlation coefficient of determination (R2) between the metrics and above-ground biomass (A), below-ground biomass (B) in study area. The meaning and calculation of the metrics see appendixes.
将地面实测汇总的生物量信息作为因变量, 遥感方法提取的特征变量作为自变量, 建立多元回归模型。运用逐步进入法(stepwise)和检验决定系数(R2)的变化情况来选择进入模型的合适变量(Næsset & Gobakken, 2008)。如果有自变量使统计量F值过小并且t检验达不到显著水平(p > 0.1), 则予以剔除; F值较大且t检验达到显著水平(p < 0.05)则得以进入(付甜等, 2011)。
采用决定系数(R2)、均方根误差(RMSE)和相对均方根误差(rRMSE)评价回归模型的精度。rRMSE作为一个相对量, 与评价量本身的数量级水平无关, 能够更好地体现总体值域差别较大的模型的预测精度(庞勇和李增元, 2012)。
首先分别利用OLI特征变量和LiDAR特征变量构建OLI生物量估算模型(以下简称OLI模型)和LiDAR生物量估算模型(以下简称LiDAR模型), 再基于这两类特征变量构建综合生物量估算模型(以下简称综合模型)。构建这3种模型时, 均分两种情况进行分析, 首先是对所有样地无区分的统计分析, 再将样地按树种组成分成针叶林、阔叶林和混交林分别进行分析。针对不同森林类型的各模型精度评价如表2。
表2 针对不同森林类型的3种模型的精度评价表
Table 2 Assessment accuracy of three empirical models by forest type
| OLI模型 OLI model | LiDAR模型 LiDAR model | 综合模型 Combo model | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 | RMSE | rRMSE (%) | R2 | RMSE | rRMSE (%) | R2 | RMSE | rRMSE (%) | ||
| 地上生物量 Above-ground biomass | 所有样地 All plots | 0.41 | 21.89 | 26 | 0.65 | 16.96 | 20 | 0.65 | 16.95 | 20 |
| 针叶林 Coniferous forest | 0.67 | 12.89 | 17 | 0.82 | 9.61 | 13 | 0.86 | 8.59 | 11 | |
| 阔叶林 Broad-leaf forest | 0.74 | 19.02 | 20 | 0.93 | 9.52 | 10 | 0.93 | 9.52 | 10 | |
| 混交林 Mixed forest | 0.77 | 14.70 | 17 | 0.80 | 13.74 | 16 | 0.83 | 12.84 | 15 | |
| 地下生物量 Below-ground biomass | 所有样地 All plots | 0.57 | 4.90 | 19 | 0.64 | 4.47 | 17 | 0.69 | 4.17 | 16 |
| 针叶林 Coniferous forest | 0.70 | 3.59 | 16 | 0.75 | 3.24 | 14 | 0.91 | 2.00 | 9 | |
| 阔叶林 Broad-leaf forest | 0.80 | 3.11 | 12 | 0.86 | 2.69 | 10 | 0.92 | 2.03 | 8 | |
| 混交林 Mixed forest | 0.84 | 3.71 | 14 | 0.83 | 3.74 | 14 | 0.92 | 2.55 | 10 | |
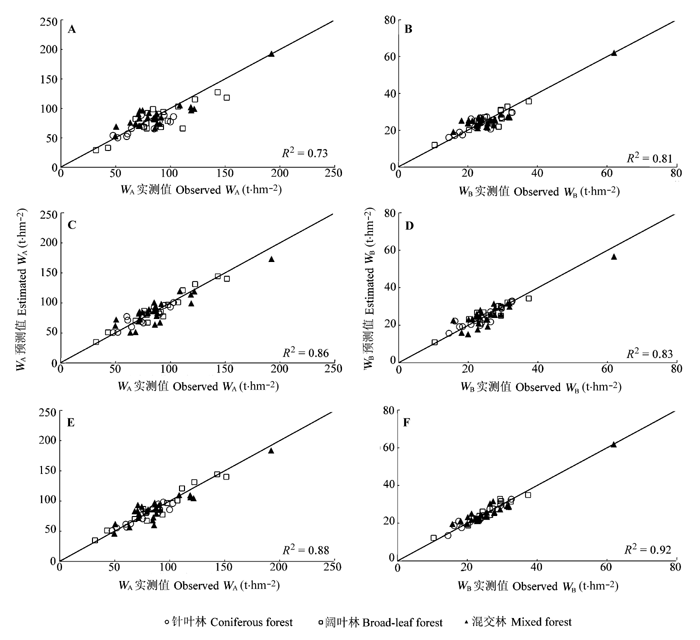
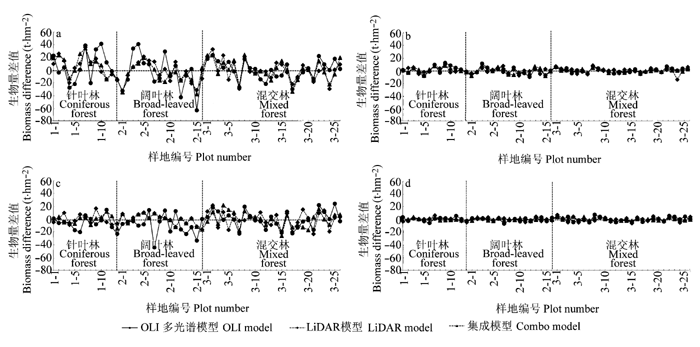
表2汇总了各个模型的精度评价情况, 利用OLI模型估算生物量时, 混交林模型(地上生物量R2为0.77; 地下生物量R2为0.84)的估算精度高于阔叶林(地上生物量R2为0.74; 地下生物量R2为0.80), 阔叶林高于针叶林(地上生物量R2为0.67; 地下生物量R2为0.70), 针叶林高于所有样地无区分分析(地上生物量R2为0.41; 地下生物量R2为0.57)的精度。利用LiDAR模型和综合模型估算生物量时, 阔叶林模型的估算精度最高(LiDAR模型: 地上生物量R2为0.93; 地下生物量R2为0.86, 综合模型: 地上生物量R2为0.93; 地下生物量R2为0.92), 高于针叶林(LiDAR模型: 地上生物量R2为0.82; 地下生物量R2为0.75, 综合模型: 地上生物量R2为0.86; 地下生物量R2为0.91)和混交林(LiDAR模型: 地上生物量R2为0.80; 地下生物量R2为0.83, 综合模型: 地上生物量R2为0.83; 地下生物量R2为0.92)。如图4所示, 基于不同森林类型估算森林生物量, 综合模型(地上生物量R2为0.88; 地下生物量R2为0.92)比OLI模型(地上生物量R2为0.73; 地下生物量R2为0.81)和LiDAR模型(地上生物量R2为0.86; 地下生物量R2为0.83)散点图更贴近1:1线, 模型估算精度更高。图5描述的是分别3种模型(OLI模型、LiDAR模型以及综合模型)下应用总体模型(利用所有样地无区分模型估算森林生物量)和分森林类型模型(利用分森林类型模型估算森林生物量, 以下简称分类模型)估测不同森林类型生物量的预测值和样地实测值的差值, 总体看来, 总体模型和分类模型均表现为地下生物量估算精度高于地上生物量估算精度, 分类模型估算精度高于总体模型估算精度。
图4 基于不同森林类型地上和地下生物量样地实测值与模型(OLI模型、LiDAR模型和综合模型)预测值的对比散点图及1:1线图。A, OLI模型:地上生物量。B, OLI模型:地下生物量。C, LiDAR模型:地上生物量。D, LiDAR模型:地下生物量。E, 综合模型:地上生物量。F, 综合模型:地下生物量。
Fig. 4 Scatter plots and 1:1 line of between observed and estimated biomass using three different models by forest type. A, OLI model for WA. B, OLI model for WB. C, LiDAR model for WA. D, LiDAR model for WB. E, Combo model WA. F, Combo model for WB. WA, above-ground biomass; WB, below-ground biomass.
图5 分别3种模型(OLI模型、LiDAR模型以及综合模型)下应用总体模型和分类模型估测不同森林类型生物量的预测值和样地实测值的差值对比图。A, 总体模型:地上生物量。B, 总体模型:地下生物量。C, 分类模型:地上生物量。D, 分类模型:地下生物量。
Fig. 5 Difference between Observed and predicted biomass by using the general model and type-specific model. A, General model for WA. B, General model for WB. C, Type-specific model for WA. D, type-specific model for WB. WA, above-ground biomass; WB, below-ground biomass.
如表3和表4所示, 建立3种(共24个)模型估算地上和地下生物量部分, 将所有候选变量均带入方程进行了逐步回归分析, 总体来看, 在OLI模型和LiDAR模型里表现较敏感的纹理信息和高度百分位数在综合模型中表现也较敏感。其中, OLI模型中, 纹理信息与生物量的相关性较强, 在估算所有样地、针叶林和阔叶林生物量时CO、DI和HO较敏感(在6个模型中均被选中), 其次B547也比较敏感(8个模型中被选中5次); LiDAR模型中, 高度百分位数与生物量的相关性较强, 其中h95表现最为敏感(8个模型中被选中6次); 在综合模型中, 纹理信息对生物量的估算较敏感, 其中CO对生物量的敏感度最高(8个模型中均被选中了5次)。表3和表4还列出了OLI模型、LiDAR模型和综合模型下所有样地无区分分析模型、针叶林模型、阔叶林模型和混交林模型中地上和地下生物量各模型的置信区间。
表3 基于不同森林类型的OLI模型和LiDAR模型变量的选择及参数和置信区间
Table 3 Selected independent variables, R2, and confidence interval values for the OLI and LiDAR model by forest type
| 所有样地 All plots | 针叶林 Coniferous forest | 阔叶林 Broad-leaf forest | 混交林 Mixed forest | ||||||
|---|---|---|---|---|---|---|---|---|---|
| WA | WB | WA | WB | WA | WB | WA | WB | ||
| 截距 Intercept | 2 409.14 | 864.48 | 1.04E+09 | 2.85E+08 | 187.60 | 36.70 | 2446.32 | 914.45 | OLI模型 OLI model |
| B3 | 0.37 | ||||||||
| B547 | -0.035 | -0.007 | -0.15 | -0.06 | -0.009 | ||||
| VIS234 | 0.01 | 0.0065 | |||||||
| PC3 | -0.04 | ||||||||
| MNF4 | -96.44 | -36.26 | |||||||
| MSR | 4.10 | ||||||||
| CO | 218.01 | 80.05 | 1.04E+08 | 28 480 530 | 219.33 | 84.60 | |||
| DI | -1 335.77 | -491.58 | -6.3E+08 | -1.7E+08 | -1 338.25 | -520.93 | |||
| HO | -2 273.01 | -829.24 | -1E+09 | -2.8E+08 | -2 271.07 | -875.005 | |||
| VA | 273.39 | 58.36 | |||||||
| 置信区间 Confidence interval (t·hm-2) | [47.50- 192.26] | [11.56- 61.86] | [55.48- 96.23] | [16.03- 29.58] | [39.10- 135.24] | [12.32- 35.68] | [52.64- 192.38] | [19.05- 61.92] | |
| 截距 Intercept | -32.81 | -2.17 | -21.61 | 13.50 | -115.94 | 9.48 | -60.81 | -9.77 | LiDAR模型 LiDAR model |
| hmode | 13.94 | 3.49 | -5.87 | 2.73 | |||||
| hmax | -7.31 | ||||||||
| h30 | -120.56 | 138.36 | |||||||
| h40 | 235.50 | -218.91 | -87.73 | ||||||
| h50 | 325.85 | 21.61 | |||||||
| h60 | -284.52 | ||||||||
| h70 | -12.92 | -41.51 | |||||||
| h75 | -228.71 | ||||||||
| h80 | -93.72 | -27.86 | 16.68 | ||||||
| h90 | 123.51 | ||||||||
| h95 | 81.22 | 23.80 | 162.76 | 19.67 | 55.78 | 20.99 | |||
| h99 | -73.61 | -8.65 | |||||||
| d7 | 0.89 | 0.36 | 0.31 | ||||||
| d9 | -13.79 | ||||||||
| 置信区间 Confidence interval (t·hm-2) | [36.84- 162.70] | [13.74- 47.48] | [50.83- 100.67] | [15.71- 32.93] | [34.84- 144.47] | [10.90- 34.27] | [50.67- 173.34] | [15.24- 56.67] | |
表4 基于不同森林类型的综合模型变量的选择及参数情况和置信区间
Table 4 Selected independent variables and associated statistics in our combo model by forest type
| 所有样地 All plots | 针叶林 Coniferous forest | 阔叶林 Broad-leaf forest | 混交林 Mixed forest | |||||
|---|---|---|---|---|---|---|---|---|
| WA | WB | WA | WB | WA | WB | WA | WB | |
| 截距 Intercept | -34.93 | 785.68 | 1.32E+09 | -9.94 | -115.94 | 65.97 | 78.07 | 748.99 |
| B3 | 0.02 | |||||||
| B547 | -0.05 | |||||||
| CO | 10.31 | 76.24 | 1.32E+08 | 35.53 | 75.10 | |||
| DI | -462.14 | -7.9E+08 | -31.68 | -448.39 | ||||
| HO | -776.42 | -1.3E+09 | -743.58 | |||||
| VA | 17.21 | 55.73 | ||||||
| hmode | 10.53 | |||||||
| hmean | 8.57 | |||||||
| hvar | 7.42 | |||||||
| hstd | 8.76 | |||||||
| h30 | 138.36 | |||||||
| h40 | -218.91 | 2.27 | ||||||
| h50 | 1.58 | |||||||
| h70 | 112.63 | |||||||
| h80 | -49.47 | -114.51 | ||||||
| h95 | 45.75 | 162.76 | ||||||
| h99 | -73.61 | |||||||
| d7 | -1.80 | -0.25 | ||||||
| 置信区间 Confidence interval (t·hm-2) | [37.59- 169.87] | [16.16- 61.90] | [51.46- 99.03] | [13.44- 32.78] | [34.84- 144.47] | [12.17- 34.96] | [46.16- 184.05] | [19.59- 61.90] |
OLI传感器对ETM+的近红外波段的设置进行了优化, 波段范围由ETM+的0.775-0.900 μm缩减到0.845-0.885 μm, 有效避开0.825 μm附近水汽吸收特征, 提高了近红外波段的灵敏度。另外, 在数据量化级别与传感器扫描方式上, 采用了12 bit的数据量化级, 增强了影像数据的辐射分辨能力, 并避免了8 bit数据在高反射地区出现的数据饱和现象, 采用线阵“推扫式”扫描方式, 这种平行轨道的扫描方式能够获得更高的信噪比和几何定位精度, 使影像数据产品更加准确有效(姜高珍等, 2013)。Landsat 8 OLI数据的这些特性对本研究生物量估算具有积极意义。
Lu等(2003)应用TM影像针对热带森林研究发现, 纹理特征值结合波段值或植被指数来估测森林生物量时, 精度比单独用遥感影像的波段值或植被指数精度有较大提高, 该结论在本研究中也得到了验证。如表3所示, 在OLI模型和综合模型里, CO、DI、HO纹理特征在估算所有样地、针叶林、混交林生物量时都被模型选中, 说明纹理信息在估算这几种森林类型生物量时具有很强的解释作用, 敏感度较好。但是在阔叶林生物量估测模型中, 纹理信息的解释能力明显降低。这主要是由于阔叶林树冠形状不规整, 空间的可重复性差, 因而用纹理测度(强调纹理基元的空间重复出现与规则排列)来再现阔叶林的空间形态特征时表达能力下降(李明诗等, 2006)。
应用高度百分位数变量来估测森林参数的方法在激光雷达反演森林参数中广泛应用。Næsset和Gobakken (2008)对挪威北部森林公园的1395块样地做了地上和地下生物量估测研究, 将样地按照树种组成、龄级和立地等级进行分类, 把高度百分位数和冠层密度作为独立变量, 立地和龄级等作为虚变量, 树种组成作为连续变量构建了回归模型, 其决定系数也达到了0.7以上。类似的变量在本研究中利用LiDAR数据估算森林生物量的过程中也表现出了较好的敏感度, 如表3所示。基于3种森林类型分别进行LiDAR特征变量的筛选, 3种森林类型筛选出的LiDAR高度变量和密度变量均有一定差异, 这与相应的森林类型的垂直结构、各组分的分布特点是相关的。
利用分森林类型的LiDAR模型和综合模型估算生物量, 阔叶林模型的估算精度高于混交林, 这可能是受森林群落结构复杂程度的影响, 阔叶林往往森林结构较单一, 而混交林结构相对较复杂, 因而激光雷达返回信号的变化也较大, 从而降低了生物量的估测精度(庞勇和李增元, 2012)。通过本研究还可以看出, 综合模型估算生物量的结果与单独使用OLI模型和LiDAR模型的估算结果相比, 精度有明显的提高。多光谱数据能够通过地物对光谱的响应实现森林水平结构参数的提取; 激光雷达技术则通过主动向研究对象发射脉冲, 并接收反射回波的方式, 获取传统光学遥感所不能获取的森林垂直结构信息(刘丽娟, 2011), 主、被动遥感技术的协同理论上可以实现数据的优势互补, 一定程度上能够提高参数提取的精度。本研究也验证了此理论。
储存在枯枝落叶和土壤中的碳占生态系统碳储量的30%-90% (方精云和王娓, 2007), 森林生物量的20%-40%由地下生物量组成(Dixon et al., 1994), 因此, 地下生物量的研究是进一步阐述全球陆地生态系统物质循环和能量流动的基础。森林地下生物量的测定由于根系难以取得而成为研究的难点, 传统实地测定地下生物量的挖掘收获法很难获取较大区域的地下生物量, 需要高强度的劳动且对样地的破坏性较大(朱桂林等, 2008)。本研究选择了利用模型法估算地下生物量, 基于Landsat 8 OLI遥感数据和LiDAR数据, 结合样地实测的地下生物量值, 对地下生物量进行遥感法估算, 精度达到了0.69以上, 在估算混交林地下生物量时精度达到了0.92, 取得了较好的结果, 说明遥感方法建模估测地下生物量具有必要性以及准确性。
以常熟虞山林场为研究对象, 通过对OLI多光谱影像和机载小光斑LiDAR数据的处理分析以及外业样地的调查, 进行了利用多元回归方法进行森林生物量反演的试验。研究结果表明: OLI模型估算生物量时, 混交林估算精度相对较高, 针叶林和阔叶林估算精度相对较低; LiDAR模型和综合模型估算生物量时, 阔叶林估算精度相对较高, 针叶林和混交林估算精度相对较低。综合模型生物量估算精度高于OLI模型和LiDAR模型。分类模型生物量的估算精度高于总体模型的估算精度。在OLI模型和LiDAR模型里表现较敏感的纹理信息和高度百分位数变量, 在综合模型中表现也较敏感。本研究基于OLI多光谱和机载小光斑LiDAR数据估算北亚热带森林地上和地下生物量取得了较好的结果, 为估算森林生物量提供了一个切实可行的思路。
致谢 感谢常熟虞山国家森林公园的林业工作者在样地调查中提供的帮助以及传授的经验和知识, 并感谢所有的外业工作者。
作者声明没有竞争性利益冲突.
| [1] |
a). Mapping above- and below-ground biomass components in subtropical forests using small-footprint LiDAR. |
| [2] |
b). Using small-footprint discrete and full-waveform airborne LiDAR metrics to estimate total biomass and biomass components in subtropical forests. |
| [3] |
Optimized extraction of forest parameters in subtropical forests based on airborne small footprint LiDAR technology.
基于机载小光斑LiDAR技术的亚热带森林参数信息优化提取 .
|
| [4] |
Carbon pools and flux of global forest ecosystems. |
| [5] |
Estimation of Forest Canopy Height and Biomass in Three Gorges Reservoir Area Based on Multi-source Remote Sensing Data .基于多源遥感数据的三峡库区森林冠层高度与生物量估算方法研究 . |
| [6] |
Lidar remote sensing for forestry. |
| [7] |
Estimating biomass carbon of China’s forests: Supplementary notes on report published in Science (291: 2320-2322) by FANG et al. (2001). 中国森林生物量的估算: 对Fang等Science一文(Science, 2001, 291: 2320-2322)的若干说明 . |
| [8] |
Soil respiration as a key below ground process: issues and perspectives .作为地下过程的土壤呼吸: 我们理解了多少 ? |
| [9] |
|
| [10] |
Prediction of subtropical forest parameters using airborne laser scanner. 亚热带森林参数的机载激光雷达估测 . |
| [11] |
Estimating forest aboveground biomass using HJ-1 satellite CCD and ICESat GLAS waveform data.
|
| [12] |
Review of 40-year earth observation with landsat series and prospects of LDCM. Landsat系列卫星对地观测40年回顾及LDCM前瞻 . |
| [13] |
Determination of terrain models in wooded areas with airborne laser scanner data. |
| [14] |
Lidar remote sensing for ecosystem studies. |
| [15] |
Modeling forest aboveground biomass by combining the spectrum, textures with topographic features. 结合光谱、纹理及地形特征的森林生物量建模研究 . |
| [16] |
Forest Parameters Inversion Using Airborne LiDAR and Hyperspectral Data Fusion .基于机载LIDAR和高光谱融合的森林参数反演研究 . |
| [17] |
Estimation of forest stand parameters using Landsat TM images in the brazilian amazon basin.
|
| [18] |
Review of application of LiDAR to estimation of forest vertical structure parameters. 激光雷达在森林垂直结构参数估算中的应用 . |
| [19] |
Estimation of above- and below-ground biomass across regions of the boreal forest zone using airborne laser. |
| [20] |
Inversion of biomass components of the temperate forest using airborne lidar technology in Xiaoxing’an mountains, northeastern of China. 基于机载激光雷达的小兴安岭温带森林组分生物量反演 . |
| [21] |
Fusion of small footprint LiDAR and multispectral data to estimate plot-level volume and biomass in deciduous and pine forests in Virginia, USA.
|
| [22] |
Soil carbon pools and world life zones. |
| [23] |
Analysis of new characteristics of the first Landsat 8 image and their eco-environmental significance. 新一代Landsat系列卫星: Landsat 8遥感影像新增特征及其生态环境意义 . |
| [24] |
Review of methods on estimating forest above ground biomass. 森林地上生物量估测方法研究综述 . |
| [25] |
An overview of methods of measuring underground-biomass and introduction of new technique. 植物地下生物量测定方法概述及新技术介绍 . |

/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}