|
|
||||||||||||||||||
|
卫星遥感监测产品在中国森林生态系统的验证和不确定性分析——基于海量无人机激光雷达数据
植物生态学报
2022, 46 (10):
1305-1316.
DOI: 10.17521/cjpe.2022.0158
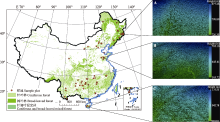
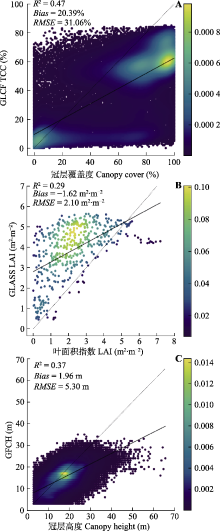
准确获取森林结构参数对森林生态系统研究及其保护有着重要意义。卫星遥感数据作为获取大尺度森林结构参数的重要数据源, 已被制作成各种植被监测产品并被应用于森林质量状况变化评估、森林生物量估算以及森林干扰和生物多样性监测等研究。然而, 这些卫星遥感植被监测产品针对中国复杂多样的森林区域缺乏有效验证, 在不同林况和地形条件下的不确定性也不明确。激光雷达具备高精度三维信息采集的优势, 在国内外已被广泛用于森林生态系统监测和卫星遥感产品验证。为此, 该研究利用在中国114个样地收集的153 km2的无人机激光雷达数据, 构建了我国森林结构参数验证数据集, 并以此为基础对3套全球遥感监测产品(全球叶面积指数(GLASS LAI)、全球冠层覆盖度(GLCF TCC)、全球冠层高度(GFCH))进行了像元尺度的验证, 并分析了其在不同坡度、覆盖度和林型条件下的不确定性。研究结果表明: 与无人机激光雷达获取的叶面积指数、覆盖度以及冠层高度相比, GLASS LAI、GLCF TCC、GFCH在中国森林区域均存在一定的不确定性, 且受林况和地形因素影响的程度不一致。对GLASS LAI和GLCF TCC影响的最大因素分别为林型和覆盖度; 而GFCH则更易受地形坡度和覆盖度的影响。
表1
无人机激光雷达系统相关参数
正文中引用本图/表的段落
考虑到激光雷达传感器获取回波信息的能力以及测量精度(表1), 本研究在植被结构简单区域采用LiAir 220, 在植被结构复杂区域采用LiAir Pro无人机激光雷达系统进行数据采集, 两套设备均能够获取高精度和高密度的点云数据。最终的点云数据能够反映完整的森林垂直结构信息, 样地平均点云密度达到171点·m-2, 其中点云密度最高的样地可达1 427点·m-2, 最低约为26点·m-2, 均能保证叶面积指数、覆盖度以及冠层高度的准确提取(Jakubowski et al., 2013; 李文娟等, 2015; Tang et al., 2019)。
获取的无人机激光雷达数据均按照统一的技术流程进行预处理, 主要包括去噪、滤波、归一化等步骤。无人机激光雷达在飞行过程中容易产生各种噪点, 为了提高点云质量, 本研究首先采用孤立点算法结合人工修正方式去除噪点(尤号田等, 2014)。去噪后, 采用渐进三角网加密算法对点云进行滤波处理, 将所有的点云分成地面点和非地面点(Zhao et al., 2016)。随后利用不规则三角网插值算法将地面点和非地面点分别生成1 m分辨率数字高程模型(DEM)和数字表面模型(DSM), 并通过DSM和DEM的差值得到冠层高度模型(CHM)。利用DEM生成每个样地1 m分辨率的坡度图, 并提取样地DEM的边界作为无人机激光雷达数据的矢量范围用于后续植被参数产品裁剪。最后采用基于DEM的归一化方法, 对去噪后的点云进行归一化处理以便后续分析使用。上述预处理操作均在LiDAR360点云处理软件中进行。
本文的其它图/表
|