林分平均高、平均胸径、林分密度、蓄积量等林分特征变量的精确测定对于森林管理与生态监测具有重要意义(庞勇等, 2005 )。传统的测定方式为人工实地测量, 耗时耗力且只能获取小面积数据, 难以获取区域尺度或更大尺度的信息。遥感方法能快速地获取大面积森林状态信息, 降低人力和物力的消耗, 且在数据的完整性和时间性上具有较高的精度(Wulder et al ., 2010 )。但光学遥感数据主要记录的是森林的水平结构信息, 其遥感信号穿透性较低, 难以有效地反映森林的垂直结构; 且在茂密林地区域, 即使森林具有很高的复杂度和变异度, 表现在遥感图像上的光谱差异也很小, 导致林分特征信息呈现区域性光谱饱和(Duncanson et al ., 2010 ; 李德仁等, 2012 )。
激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算。但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 )。近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本。Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM)。Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云。Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果。Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析。Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌。Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响。然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 )。
本研究以江苏省南京市东郊紫金山余脉(牛山)的北亚热带天然次生林为研究对象, 探索集成高分辨率UAV影像和LiDAR点云数据估算常用林分特征的技术方法。研究目的为: 1)尝试实现通过LiDAR点云构建林下高精度DEM并结合UAV像对序列构建植被冠层上层三维点云, 将二者进行高度信息归一化后提取高度和冠层点云密度相关的特征变量的实验路线; 2)基于最优(决定系数最高)模型估算平均高、林分密度、胸高断面积、蓄积量。
1 研究区和数据来源
1.1 研究区概况
研究区牛山位于江苏省南京市东郊紫金山余脉, 中心地理坐标为: 118.80° E, 32.07° N, 总面积13.90 hm2 , 高程16-40 m。为北亚热带季风气候, 四季分明, 年降水量1005.9 mm。主要森林类型为北亚热带常绿落叶阔叶混交林, 主要树种为榉树(Zelkova serrata )、构树(Broussonetia papyrifera )、女贞(Ligustrum lucidum) 、青檀(Pteroceltis tatarinowii )等阔叶树, 另有少量雪松(Cedrus deodara )、圆柏(Juniperus chinensis )、柳杉(Cryptomeria japonica var. sinensis )等针叶树。研究区土壤类型大多为黄棕壤和石灰岩土, 林木多为过成熟林, 林分结构稳定, 且成林时间较长, 目前年生长率较低。
1.2 LiDAR数据获取
LiDAR数据获取装置为Optech Airborne Laser Terrain Mapper (ALTM) 3100激光传感器(Optech, Toronto, Canada)斑离散点云数据。每个激光返回点包含三维坐标值(x, y, z )、强度值(intensity)和返回类型(return type)等信息。
1.3 UAV影像数据获取
研究采用的无人机搭载平台为固定翼飞机, 配备惯性测量单元(IMU, inertial measurement unit) (ADI, 上海)获取飞机实时的三轴姿态角\角速率以及加速度。IMU型号为ADIS16355, 集成了3轴加速度计及3轴陀螺, 主要技术参数为: 1)可控最高空速200 m·s-1 ; 2)可控最高地速350 m·s-1 ; 3)可控飞行高度20-5500 m; 4)导航精度(偏航距) ≤ ±3 m; 5)定高控制精度≤ ±2 m。无人机主要技术参数: 1)翼展长度2710 mm; 2)机身长1956 mm; 3)最大推力8 kg; 4)总质量6 kg; 5)有效载荷4 kg; 6)飞行高度500 m; 7)飞行速度100 km·h-1 ; 8)抗风能力6级。无人机通过地面遥控系统进行飞行的控制和通讯。
遥感数据来源于佳能EOS 5D Mark II高清相机(Canon, Kyushu, Japan)获取的高分辨率、真彩色数码影像。获取时间为2012年8月12日。相机的主要参数为: 1) 250万像素CMOS传感器(1920 × 1280像素); 2) 镜头: 标准8.5 mm镜头; 3)图像大小与采集速度: 每图0.7-0.9 MB空间; 每图2-5 s; 4)曝光时间: 1/2500 s; 5)焦距: 35 mm; 6)尺寸与质量: 152 mm × 113.5 mm × 75 mm, 810 g。航向和旁向重叠分别为30%和70%。
1.4 地面实测数据获取
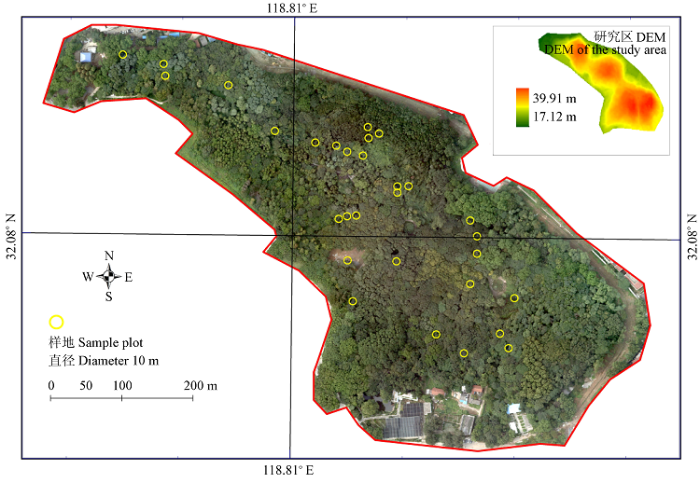
结合研究区实际情况并通过前期对研究区林木林分特征变异性的调查分析, 设计地面实测采用圆形样地方式, 直径10 m, 30个随机分布于整个牛山研究区(图1 )。样地调查时间为2014年5月。样地的圆心点通过Trimble GeoXH6000 Handhelds (Trimble Navigation Limited, 上海)手持GPS定位(集成GPS和GLONASS系统, 并配备了双频GNSS天线)。通过接收JSCORS高精度实时差分信号, 提升其水平定位精度到0.5 m以内。样地的方向和倾角通过罗盘仪测定, 边界半径通过皮尺量测。在各个样地中, 记录胸径≥5 cm的每株树木的树种, 并量测胸径、树高。胸径采用围尺量测, 树高通过Vertex IV超声波测高器(Haglof, 北京)获取。
图1 牛山无人机影像及样地空间分布。DEM, 地面数字高程模型。
Fig. 1 UAV image of Niushan forest, with yellow circles showing the spatial locations of the sample plots. DEM, digital elevation model.
样地选择参考了研究区内典型的树种组成、立地条件以及树木年龄(参考历史调查数据以及前期考察结果)。在样地内进行每木测量, 选取样地Lorey’s树高、林分密度和蓄积量为反演的林分特征, 计算方法如下:
Lorey’s树高(即断面积加权树高)计算公式如下:
公式(1)中: hi 为第i 株树高, gi 为第i 株树木胸高断面积, k 为样地内株数。
2)林分密度通过为单位面积上的树木数, 以plant·hm-2 为单位, 通过样地实测林分密度转换每hm2 林分密度得到;
3)胸高断面积指立木距地面以上1.3 m处树干的横断面积, 以m2 ·hm-2 为单位, 通过样地实测胸径和林分密度计算而来。
4)蓄积量依据“江苏省立木一元材积式” (《江苏省森林资源规划设计调查操作细则(2007)》)计算,
通过单木胸径(实测值)汇总到样地级蓄积量, 再换算为单位面积(hm2 )蓄积量。本研究采用的蓄积量计算公式见表1 , 各实测值范围和汇总见表2 。
2 研究方法
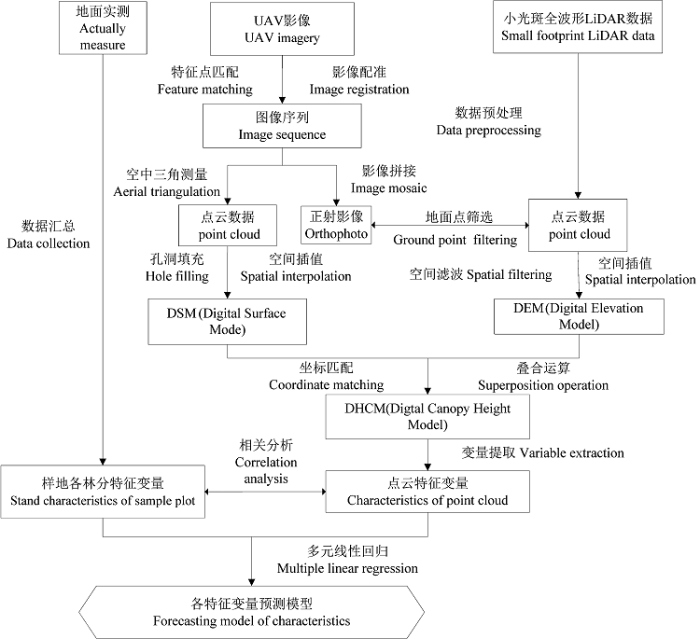
本研究基于LiDAR点云获取的林下高精度DEM和UAV数字影像像对序列构建的植被冠层上层三维点云数字表面模型(DSM)提取高度和冠层点云密度相关的特征变量并构建林分特征变量预测模型, 研究技术流程参见图2 。
图2 研究技术路线图。
Fig. 2 Technical flow chart for this study.
2.1 LIDAR数据处理
利用LiDAR数据生成DEM, DEM是获取相对树高的前提。数据处理的过程包括以下三步: 1)数据预处理, 包括异常点剔除和重叠数据处理, 首先去除高程噪声点, 噪声点分两类, 一类为高程负值点, 一类为高程突变剧烈点。第二类点需参考研究区实际情况进行判断。其次去除LiDAR重叠航带的数据, 由于LiDAR数据是分航带进行的, 需要去除跨带的数据点, 参考赵峰(2007) 提出的方法, 采用以大于激光点云平均间距的平滑滤波进行多次平滑消除重叠带。2)点云数据分类, 将点云数据分为裸地与非裸地两类, 激光点云的分类采用滤波和分类的方法提取裸地(即地形)高程信息, 将生成的裸地点云以点状矢量文件输出, 再与UAV影像叠加进行目视纠正。3) DEM生成, 将分类后的裸地点采用反距离加权法进行1 m × 1 m的插值, 生成DEM。
2.2 UAV影像数据处理
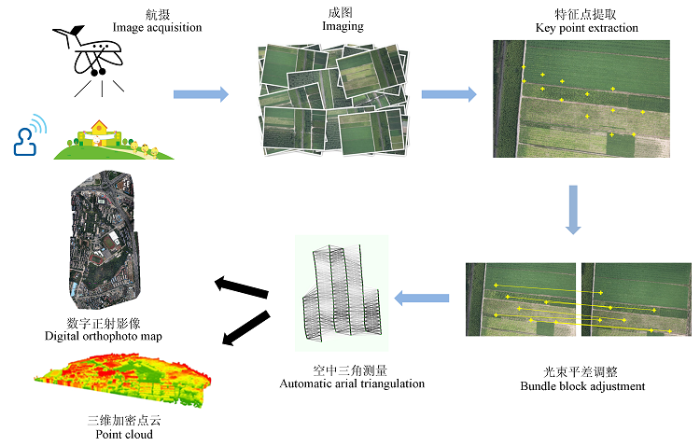
UAV影像数据处理由航摄、成图、特征点提取与匹配、空中三角自动测量、数字正射影像(DOM)和三维加密点云的生成七部分组成(图3 )。具体流程为:
(1)通过UAV平台拍摄研究区共132幅数字影像, 通过IMU实时记录每幅影像的经纬度、高程、翻滚度、俯仰和航向五个参数生成Exif图像文件, 每幅影像分辨率为1920 × 1080。
(2)借助Pix4D软件获取影像像对的特征点, 平均每幅影像获取特征点为8760个, 平均每幅图像建立4992匹配点对, 通过光束法平差进行影像外方位元素的解析, 完成图像标定, 参与平差的二维点共673471个, 生成三维点221175, 平均投影误差为0.23像素。
(3)利用已有三维点、影像定标和外方位元素解析生成研究区三维点云, 在剔除明显的异常点后, 通过平滑处理实现对“孔洞”的填充, 再利用反距离加权法插值为与LiDAR数据相适配的1 m × 1 m的栅格生成DSM以便点云的归一化; 同时通过影像拼接生成研究区UAV全幅影像, 作为进行LiDAR点云与UAV点云精度匹配的辅助验证底图。
图3 UAV数据处理图。
Fig. 3 Procedures for processing the UAV data.
2.3 归一化点云变量提取
点云的归一化指对点云高度处理, 即距离地表的相对高度的获得, 方式由DSM与DEM差值而来, 归一化的结果为数字树冠高层模型(DCHM)。由于DSM和DEM二者数据平台不一致, 数据差异性较大, 主要有两点: 1)地理坐标不一致: 由于传感平台不一致, 本研究中UAV影像数据采用wgs84坐标系统, 而LiDAR采用西安80坐标系统。文章采用实地获取的17个典型地物的地面验证点坐标, 参考前人研究成果(蒋小军等, 2010 ; 徐仕琪等, 2007 ), 通过基于布尔莎七参数法的三维坐标差转换模型, 将DEM与DSM坐标统一, 以便叠合运算。2)点云数量有差距: 研究区LiDAR点云数量为22730, 约0.17点·m-2 , UAV影像点云数量为772916, 约5.56点·m-2 ,两者数量差异较大, 通过统一插值为1 m × 1 m栅格数据满足空间运算前提。
将DSM与DEM进行差值运算, 获得DCHM, 完成点云数据的归一化。建模数据变量从归一化后的点云中进行提取, 参照LiDAR点云研究成果(Lefsky et al ., 2001 ; Popescu, 2007 ; 刘东起等, 2012 ; 庞勇和李增元, 2012 ), 本研究选取了高度分位数变量组(h 10 、h 25 、h 30 、h 40 、h 60 、h 75 、h 85 、h 90 ), 即森林冠层高度垂直分布的分位数(第10, 25, 30, 40, 60, 75, 85, 90分位数); 密度变量组(d 10 、d 25 、d 30 、d 40 、d 60 、d 75 、d 85 、d 90 ), 即在相应百分位高度等级以上的点云在所有点云中所占的百分比; 平均高度(h avg ), 即归一化高度的平均值; 最大高度(h max ), 即归一化高度的最大值; 最低高度(h min )即归一化高度的最小值; 同时, 为了避免下层植被对冠层分析的干扰, 去除了高度2 m以下点云。
2.4 模型构建
通过获取归一化点云提取的19个林分特征变量与实测样地4个关键变量之间线性关系进行精度的验证(表3 )。验证的方式采取多元线性回归方法。建立回归模型运用逐步进入法(stepwise)和观察决定系数(R 2 )的变化情况来选择进入模型的合适变量, 因样地数据较少, 所有样地均参与模型构建。
验证的指标选择: 1) R 2 值越大, 则因变量与自变量之间相关性越强, 这是对回归直线拟合优度的检验。
公式(2)中,
估算值、 n 为样地数量。
2)均方根误差(RMSE ): 表达的是观测值与真值偏差的平方和观测次数n 比值的平方根。
3)相对均方根误差(rRMSE ): 定义为RMSE 与实测结果算术平均值的比值, rRMSE 越小, 模型预测的效果越好。
3 结果分析
3.1 特征量相关性分析
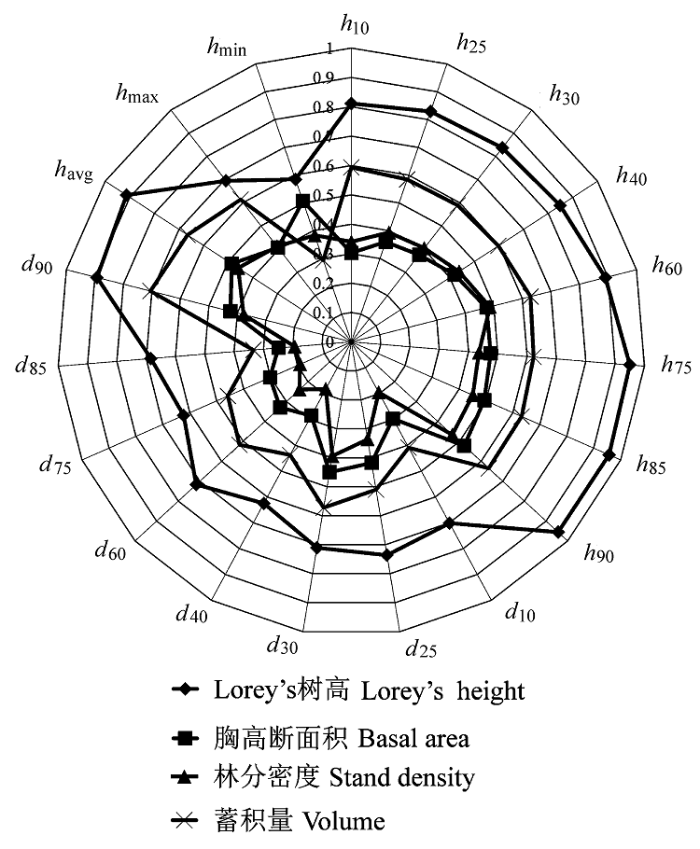
通过相关性分析可见(图4 ), 归一化点云提取的特征变量与Lorey’s树高的相关度最高(R 2 = 0.58- 0.95), 蓄积量次之(R 2 = 0.29-0.7), 胸高断面积与林分密度最低。联合提取变量中, 均高(h avg )、高分位高度分位数(h 75 -h 90 )和中高分位点云密度(d 60 , d 90 )与各林分特征之间的相关性也较高, 而高度最值(h min )与中低分位高度分位数及点云密度与各林分特征之间相关性较低。
图4 点云特征变量与实测林分特征之间的相关分析。h 10, h 25 ……h 90 为相应高度百分位数; h avg 为算术平均高; h max 为最大高度; h min 为最小高度; d 10 , d 25 ……d 90 为相应高度分位数点云密度。
Fig. 4 Analysis of coefficients between point-cloud metrics and stand characteristics. h 10, h 25 …h 90 , height percentile; h avg , average height; h max , maximum height; h min , minimal height; d 10 , d 25 … d 90 , point cloud density.
3.2 估算模型构建及精度分析
通过多元回归分析, 构建估算模型, 模型演算变量与实测变量较为拟合(R 2 为0.29-0.86)(表4 )。从模型参数来看, 各林分回归方程参数在4个以内, 自变量参数包括高度百分位数、点云密度和高度均值等, 均与相应的林分特征呈较高的相关性。林分特征变量拟合中, Lorey’s树高拟合度最高, 蓄积量次之, 胸高断面积和林分密度较低。拟合结果与相关性分析结果一致。从rRMSE 看, 精度从高到低依次为Lorey’s树高(6.47%)、蓄积量(6.93%)、胸高断面积(16.38%)、林分密度(27.04%)。
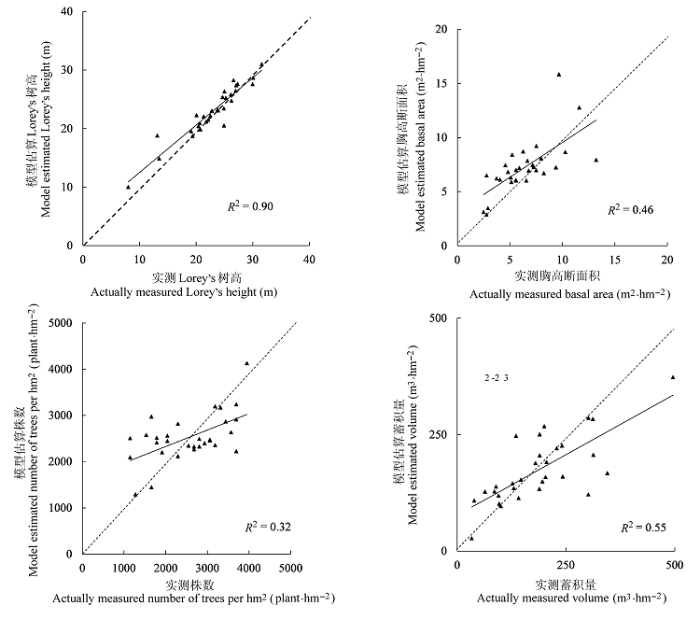
由各林分特征散点图(图5 )来看, Lorey’s树高识别精度最高(R 2 = 0.9), 拟合的方程与1:1验证线基本吻合, 相关性显著; 胸高断面积和林分密度精度相对较低(R 2 = 0.46和R 2 = 0.32), 蓄积量精度居中(R 2 = 0.55), 较为相关。
图5 各林分特征值与模型估算值对比(虚线为1:1验证线)。
Fig. 5 Comparison of field-measured characteristics and the estimates from model (the dotted line is 1:1 validation line).
4 讨论
通过结合UAV与LiDAR数据提取典型林分特征, 利用特征点匹配算法和空中三角测量技术生成研究区三维点云作为数字表面模型结合LiDAR提取的数字地形模型计算树冠冠层模型, 再结合地面实测林分调查数据与归一化点云变量构建多元回归估算模型并验证其精度。相关分析表明联合提取的点云变量与森林垂直信息(树高)具有很高的敏感性, 蓄积量次之, 林分密度和胸高断面积最低。由于UAV数字影像本身不具备穿透性, 只能获取林区冠层的水平信息, 因此对主要反映密度信息的林分密度和同时反映密度与垂直信息的胸高断面积敏感性较低, 而蓄积量反映了林区的综合性信息, 敏感度居中。
构建的多元回归模型自变量包括了高度分位数、点云密度和高度信息三组特征变量, 高度分位数与森林的垂直信息相关度较高。付甜等(2011)应用小光斑LiDAR离散点云数据估算加拿大沿海森林的结构参数, 选取的模型变量有h 50 、h 30 、d 60 、d 90 等, 其中冠层返回密度参与的模型精度要高于单个高度信息的模型。曹林等(2014)在江苏虞山亚热带林区进行LiDAR森林参数提取发现h avg 、d 60 和高度变异系数(h cv )在不同的模型构建时均被反复选中。本研究获取的模型参数中还包括h 10 、h min 等低分位数和最值因子, 这是由UAV平台的不可穿透性决定的, 研究采用的UAV数字影像获取的是树冠上层信息, 描述的是树冠高度的起伏, 而无法获取受到遮挡的树冠下层信息。反映在点云数据上, UAV点云虽较LiDAR点云密度较高, 但点云高度离散度较低(研究区UAV点云标准偏差为4.66, LiDAR点云标准偏差为6.01), 所以低分位的高度变量往往相当于LiDAR数据的中等分位, h min 相当于同等密度LiDAR点云的中等高度, 也与前人研究成果相符。模型计算的结果显示森林垂直信息的树高反演精度最高, 反映水平信息的胸高断面积和林分密度的反演精度较低, 而综合了水平信息和垂直信息的蓄积量反演精度居中。
因本研究使用的LiDAR点云密度较低, 没有进行单独LiDAR估算的对比实验, 但通过对前人研究成果分析, 本研究构建的各林分特征多元回归预测模型的拟合效果和精度都近似于其他仅使用LiDAR点云特征变量拟合模型的精度。Næsset (2002)基于LiDAR对挪威亚寒带森林结构参数进行了估算, 结果显示各森林参数估算模型的R 2 为: 平均高(0.82-0.95)、胸高断面积(0.69-0.89)和蓄积量(0.80-0.93)都略高于本研究得出的各模型R 2 。因亚热带森林多为复层林, 森林结构更为复杂(树高和密度的变动大), 故提取信息精度偏低且变异性高。何祺胜等(2009)利用LiDAR点云提取高寒带云杉(Picea asperata )单木结构参数并应用多元逐步回归分析法, 建立了样地尺度上平均树高、冠幅等与实测的林分平均高、平均冠幅、平均胸径、林分密度、地上生物量等之间的统计回归关系, 结果显示, 林分平均高、林分算术平均高、地上生物量的估测方程精度较高(R 2 > 0.7), 而平均冠幅、平均胸径、林分密度的估测方程决定系数略低(R 2 > 0.5), 与本文结果相近。本文研究对象为亚热带混交林, 森林结构比以上文献中的更加复杂, 但由于UAV点云密度比较高, 加上研究区面积小、样地面积小等因素, 取得了较理想的实验结果。可见集成高分辨率UAV影像与LiDAR点云进行林分特征的反演具有一定的可行性。
5 结论
本研究从UAV和LiDAR两组点云数据中提取特征变量进行林分特征反演, 一方面冠层点云采用UAV数据, 相对于LiDAR, 具有灵活性高、廉价等特点, 数据获取方便, 具有长期定时重复观测的可能性。另一方面利用LiDAR的穿透性获取地形数据, 而地形相对稳定, 可以作为长期观测的数据基础。二者结合, 各取所长, 可探索一条廉价、灵活的森林状态监测方式。
The authors have declared that no competing interests exist.
作者声明没有竞争性利益冲突.
参考文献
文献选项
[1]
Azzari G Goulden ML Rusu RB 2013 ). Rapid characterization of vegetation structure with a microsoft kinect sensor.
Sensors , 13 , 2384 -2398 .
[本文引用: 1]
[2]
Cao L Dai JS Xu JX Xu ZQ She GH 2014 ). Optimized extraction of forest parameters in subtropical forests based on airborne small footprint LiDAR technology.
Journal of Beijing Forestry University , 36 (5 ), 13 -21 .
(in Chinese with English abstract) [曹林 , 代劲松 , 徐建新 , 许子乾 , 佘光辉 (2014 ). 基于机载小光斑 LiDAR 技术的亚热带森林参数信息优化提取
. 北京林业大学学报 , 36 (5 ), 13 -21 .]
[3]
Cao L She GH Dai JS Xu JX 2013 ). Status and prospects of the LiDAR-based forest biomass estimation. Journal of Nanjing Forestry University (
Natural Sciences Edition ), 37 (3 ), 163 -169 .
[本文引用: 1]
(in Chinese with English abstract) [曹林 , 佘光辉 , 代劲松 , 徐建新 (2013 ). 激光雷达技术估测森林生物量的研究现状及展望
. 南京林业大学学报(自然科学版) , 37 (3 ), 163 -169 .]
[本文引用: 1]
[4]
Dandois JP Ellis EC 2013 ). High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision.
Remote Sensing of Environment , 136 , 259 -276 .
[本文引用: 1]
[5]
Duncanson L Niemann KO Wulder M 2010 ). Integration of GLAS and Landsat TM data for aboveground biomass estimation.
Canadian Journal of Remote Sensing , 36 , 129 -141 .
[本文引用: 1]
[6]
Fu T Pang Y Huang QF Liu QW Xu GC 2011 ). Prediction of subtropical forest parameters using airborne laser scanner.
Journal of Remote Sensing , 15 , 1092 -1104 .
(in Chinese with English abstract) [付甜 , 庞勇 , 黄庆丰 , 刘清旺 , 徐光彩 (2011 ). 亚热带森林参数的机载激光雷达估测
. 遥感学报 , 15 , 1092 -1104 .]
[7]
Harwin S Lucieer A 2012 ). Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery.
Remote Sensing , 4 , 1573 -1599 .
[本文引用: 1]
[8]
He QS Chen EX Cao CX Liu QW Pang Y 2009 ). A study of forest parameters mapping technique using airborne LIDAR data.
Advances in Earth Science , 24 , 749 -755 .
(in Chinese with English abstract) [何祺胜 , 陈尔学 , 曹春香 , 刘清旺 , 庞勇 (2009 ). 基于LIDAR数据的森林参数反演方法研究
. 地球科学进展 , 24 , 748 -755 .]
[9]
Jiang XJ Song ZF Wu QH 2010 ). Conversion method between local independent coordinate system and WGS-84 coordinate system as well as its applications.
Railway Investigation and Surveying , 36 (4 ), 8 -10, 13 .
[本文引用: 1]
(in Chinese with English abstract) [蒋小军 , 宋占峰 , 吴清华 (2010 ). 地方独立坐标系与WGS-84坐标系转换方法及应用
. 铁道勘察 , 36 (4 ), 8 -10, 13 .]
[本文引用: 1]
[10]
Lefsky MA Cohen WB Spies TA 2001 ). An evaluation of alternate remote sensing products for forest inventory, monitoring, and mapping of Douglas-fir forests in western Oregon.
Canadian Journal of Forest Research , 31 , 78 -87 .
[本文引用: 1]
[11]
Li DR Wang CW Hu YM Liu SG 2012 ). General review on remote sensing-based biomass estimation.
Geomatics and Information Science of Wuhan University , 37 , 631 -635 .
[本文引用: 1]
(in Chinese with English abstract) [李德仁 , 王长委 , 胡月明 , 刘曙光 (2012 ). 遥感技术估算森林生物量的研究进展
. 武汉大学学报(信息科学版) , 37 , 631 -635 .]
[本文引用: 1]
[12]
Liu DQ Fan WY Li MZ 2012 ). Estimation of forest stand parameters and biomass by small-footprint LIDAR.
Journal of Northeast Forestry University , 40 (1 ), 39 -43 .
[本文引用: 1]
(in Chinese with English abstract) [刘东起 , 范文义 , 李明泽 (2012 ). 利用小光斑激光雷达估测林分参数和生物量
. 东北林业大学学报 , 40 (1 ), 39 -43 .]
[本文引用: 1]
[13]
Lucieer A Turner D King DH Robinson SA 2014 ). Using an Unmanned Aerial Vehicle (UAV) to capture micro- topography of Antarctic moss beds.
International Journal of Applied Earth Observation and Geoinformation , 27 , 53 -62 .
[本文引用: 1]
[14]
Mathews AJ Jensen JLR 2013 ). Visualizing and quantifying vineyard canopy LAI using an Unmanned Aerial Vehicle (UAV) collected high density structure from motion point cloud.
Remote Sensing , 5 , 2164 -2183 .
[本文引用: 1]
[15]
Morgenroth J Gomez C 2014 ). Assessment of tree structure using a 3D image analysis technique—A proof of concept.
Urban Forestry & Urban Greening , 13 , 198 -203 .
[本文引用: 1]
[16]
Næsset E 2002 ). Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data.
Remote Sensing of Environment , 80 , 88 -99 .
[17]
Pang Y Li ZY 2012 ). Inversion of biomass components of the temperate forest using airborne Lidar technology in Xiaoxing’an Mountains, Northeastern of China.
Chinese Journal of Plant Ecology , 36 , 1095 -1105 .
[本文引用: 1]
(in Chinese with English abstract) [庞勇 , 李增元 (2012 ). 基于机载激光雷达的小兴安岭温带森林组分生物量反演
. 植物生态学报 , 36 , 1095 -1105 .]
[本文引用: 1]
[18]
Pang Y Li ZY Chen EX Sun GQ 2005 ). Lidar remote sensing technology and its application in forestry.
Scientia Silvae Sinicae , 41 (3 ), 129 -136 .
[本文引用: 1]
(in Chinese with English abstract) [庞勇 , 李增元 , 陈尔学 , 孙国清 (2005 ). 激光雷达技术及其在林业上的应用
. 林业科学 , 41 (3 ), 129 -136 .]
[本文引用: 1]
[19]
Popescu SC 2007 ). Estimating biomass of individual pine trees using airborne LiDAR.
Biomass and Bioenergy , 31 , 646 -655 .
[本文引用: 1]
[20]
Turner D Lucieer A Watson C 2012 ). An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery based on Structure from Motion (SFM) point clouds
.Remote Sensing , 4 , 1392 -1410 .
[本文引用: 1]
[21]
Wallace L Lucieer A Watson C Turner D 2012 ). Development of a UAV-LiDAR system with application to forest inventory.
Remote Sensing , 4 , 1519 -1543 .
[22]
Westoby MJ Brasington J Glasser NF Hambrey MJ Reynolds JM 2012 ). ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications.
Geomorphology , 179 , 300 -314 .
[本文引用: 2]
[23]
Wulder MA White JC Stinson G Hilker T Kurz WA Coops NC St-Onge B Trofymow JA 2010 ). Implications of differing input data sources and approaches upon forest carbon stock estimation.
Environmental Monitoring and Assessment , 166 , 543 -561 .
[本文引用: 1]
[24]
Xu SQ Zhang XF Zhou KF Zhao TY 2007 ). Discussion of the seven-parameter coordinate transformation between WGS-84 and BJ-54.
Geomatics & Spatial Information Technology , 30 (5 ), 33 -38, 42 .
[本文引用: 1]
(in Chinese with English abstract) [徐仕琪 , 张晓帆 , 周可法 , 赵同阳 (2007 ). 关于利用七参数法进行WGS-84和BJ-54坐标转换问题的探讨
. 测绘与空间地理信息 , 30 (5 ), 33 -38, 42 .]
[本文引用: 1]
[25]
Zarco-Tejada PJ Diaz-Varela R Angileri V Loudjani P 2014 ). Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods.
European Journal of Agronomy , 55 , 89 -99 .
[26]
Zhao F 2007 ). Forest Parameter Extraction Using LiDAR Data and Digital Camera Image
. PhD dissertation, Chinese Academy of Forestry, Beijing.
[本文引用: 3]
(in Chinese) [赵峰 (2007 ). 机载激光雷达数据和数码相机影像林木参数提取研究
. 博士学位论文. 中国林业科学研究院, 北京 .]
[本文引用: 3]
Rapid characterization of vegetation structure with a microsoft kinect sensor.
1
2013
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
基于机载小光斑 LiDAR 技术的亚热带森林参数信息优化提取
2014
基于机载小光斑 LiDAR 技术的亚热带森林参数信息优化提取
2014
激光雷达技术估测森林生物量的研究现状及展望
1
2013
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
激光雷达技术估测森林生物量的研究现状及展望
1
2013
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision.
1
2013
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
Integration of GLAS and Landsat TM data for aboveground biomass estimation.
1
2010
... 林分平均高、平均胸径、林分密度、蓄积量等林分特征变量的精确测定对于森林管理与生态监测具有重要意义(庞勇等, 2005 ).传统的测定方式为人工实地测量, 耗时耗力且只能获取小面积数据, 难以获取区域尺度或更大尺度的信息.遥感方法能快速地获取大面积森林状态信息, 降低人力和物力的消耗, 且在数据的完整性和时间性上具有较高的精度(Wulder et al ., 2010 ).但光学遥感数据主要记录的是森林的水平结构信息, 其遥感信号穿透性较低, 难以有效地反映森林的垂直结构; 且在茂密林地区域, 即使森林具有很高的复杂度和变异度, 表现在遥感图像上的光谱差异也很小, 导致林分特征信息呈现区域性光谱饱和(Duncanson et al ., 2010 ; 李德仁等, 2012 ). ...
Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery.
1
2012
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
基于LIDAR数据的森林参数反演方法研究
2009
基于LIDAR数据的森林参数反演方法研究
2009
地方独立坐标系与WGS-84坐标系转换方法及应用
1
2010
... 点云的归一化指对点云高度处理, 即距离地表的相对高度的获得, 方式由DSM与DEM差值而来, 归一化的结果为数字树冠高层模型(DCHM).由于DSM和DEM二者数据平台不一致, 数据差异性较大, 主要有两点: 1)地理坐标不一致: 由于传感平台不一致, 本研究中UAV影像数据采用wgs84坐标系统, 而LiDAR采用西安80坐标系统.文章采用实地获取的17个典型地物的地面验证点坐标, 参考前人研究成果(蒋小军等, 2010 ; 徐仕琪等, 2007 ), 通过基于布尔莎七参数法的三维坐标差转换模型, 将DEM与DSM坐标统一, 以便叠合运算.2)点云数量有差距: 研究区LiDAR点云数量为22730, 约0.17点·m-2 , UAV影像点云数量为772916, 约5.56点·m-2 ,两者数量差异较大, 通过统一插值为1 m × 1 m栅格数据满足空间运算前提. ...
地方独立坐标系与WGS-84坐标系转换方法及应用
1
2010
... 点云的归一化指对点云高度处理, 即距离地表的相对高度的获得, 方式由DSM与DEM差值而来, 归一化的结果为数字树冠高层模型(DCHM).由于DSM和DEM二者数据平台不一致, 数据差异性较大, 主要有两点: 1)地理坐标不一致: 由于传感平台不一致, 本研究中UAV影像数据采用wgs84坐标系统, 而LiDAR采用西安80坐标系统.文章采用实地获取的17个典型地物的地面验证点坐标, 参考前人研究成果(蒋小军等, 2010 ; 徐仕琪等, 2007 ), 通过基于布尔莎七参数法的三维坐标差转换模型, 将DEM与DSM坐标统一, 以便叠合运算.2)点云数量有差距: 研究区LiDAR点云数量为22730, 约0.17点·m-2 , UAV影像点云数量为772916, 约5.56点·m-2 ,两者数量差异较大, 通过统一插值为1 m × 1 m栅格数据满足空间运算前提. ...
An evaluation of alternate remote sensing products for forest inventory, monitoring, and mapping of Douglas-fir forests in western Oregon.
1
2001
... 将DSM与DEM进行差值运算, 获得DCHM, 完成点云数据的归一化.建模数据变量从归一化后的点云中进行提取, 参照LiDAR点云研究成果(Lefsky et al ., 2001 ; Popescu, 2007 ; 刘东起等, 2012 ; 庞勇和李增元, 2012 ), 本研究选取了高度分位数变量组(h 10 、h 25 、h 30 、h 40 、h 60 、h 75 、h 85 、h 90 ), 即森林冠层高度垂直分布的分位数(第10, 25, 30, 40, 60, 75, 85, 90分位数); 密度变量组(d 10 、d 25 、d 30 、d 40 、d 60 、d 75 、d 85 、d 90 ), 即在相应百分位高度等级以上的点云在所有点云中所占的百分比; 平均高度(h avg ), 即归一化高度的平均值; 最大高度(h max ), 即归一化高度的最大值; 最低高度(h min )即归一化高度的最小值; 同时, 为了避免下层植被对冠层分析的干扰, 去除了高度2 m以下点云. ...
遥感技术估算森林生物量的研究进展
1
2012
... 林分平均高、平均胸径、林分密度、蓄积量等林分特征变量的精确测定对于森林管理与生态监测具有重要意义(庞勇等, 2005 ).传统的测定方式为人工实地测量, 耗时耗力且只能获取小面积数据, 难以获取区域尺度或更大尺度的信息.遥感方法能快速地获取大面积森林状态信息, 降低人力和物力的消耗, 且在数据的完整性和时间性上具有较高的精度(Wulder et al ., 2010 ).但光学遥感数据主要记录的是森林的水平结构信息, 其遥感信号穿透性较低, 难以有效地反映森林的垂直结构; 且在茂密林地区域, 即使森林具有很高的复杂度和变异度, 表现在遥感图像上的光谱差异也很小, 导致林分特征信息呈现区域性光谱饱和(Duncanson et al ., 2010 ; 李德仁等, 2012 ). ...
遥感技术估算森林生物量的研究进展
1
2012
... 林分平均高、平均胸径、林分密度、蓄积量等林分特征变量的精确测定对于森林管理与生态监测具有重要意义(庞勇等, 2005 ).传统的测定方式为人工实地测量, 耗时耗力且只能获取小面积数据, 难以获取区域尺度或更大尺度的信息.遥感方法能快速地获取大面积森林状态信息, 降低人力和物力的消耗, 且在数据的完整性和时间性上具有较高的精度(Wulder et al ., 2010 ).但光学遥感数据主要记录的是森林的水平结构信息, 其遥感信号穿透性较低, 难以有效地反映森林的垂直结构; 且在茂密林地区域, 即使森林具有很高的复杂度和变异度, 表现在遥感图像上的光谱差异也很小, 导致林分特征信息呈现区域性光谱饱和(Duncanson et al ., 2010 ; 李德仁等, 2012 ). ...
利用小光斑激光雷达估测林分参数和生物量
1
2012
... 将DSM与DEM进行差值运算, 获得DCHM, 完成点云数据的归一化.建模数据变量从归一化后的点云中进行提取, 参照LiDAR点云研究成果(Lefsky et al ., 2001 ; Popescu, 2007 ; 刘东起等, 2012 ; 庞勇和李增元, 2012 ), 本研究选取了高度分位数变量组(h 10 、h 25 、h 30 、h 40 、h 60 、h 75 、h 85 、h 90 ), 即森林冠层高度垂直分布的分位数(第10, 25, 30, 40, 60, 75, 85, 90分位数); 密度变量组(d 10 、d 25 、d 30 、d 40 、d 60 、d 75 、d 85 、d 90 ), 即在相应百分位高度等级以上的点云在所有点云中所占的百分比; 平均高度(h avg ), 即归一化高度的平均值; 最大高度(h max ), 即归一化高度的最大值; 最低高度(h min )即归一化高度的最小值; 同时, 为了避免下层植被对冠层分析的干扰, 去除了高度2 m以下点云. ...
利用小光斑激光雷达估测林分参数和生物量
1
2012
... 将DSM与DEM进行差值运算, 获得DCHM, 完成点云数据的归一化.建模数据变量从归一化后的点云中进行提取, 参照LiDAR点云研究成果(Lefsky et al ., 2001 ; Popescu, 2007 ; 刘东起等, 2012 ; 庞勇和李增元, 2012 ), 本研究选取了高度分位数变量组(h 10 、h 25 、h 30 、h 40 、h 60 、h 75 、h 85 、h 90 ), 即森林冠层高度垂直分布的分位数(第10, 25, 30, 40, 60, 75, 85, 90分位数); 密度变量组(d 10 、d 25 、d 30 、d 40 、d 60 、d 75 、d 85 、d 90 ), 即在相应百分位高度等级以上的点云在所有点云中所占的百分比; 平均高度(h avg ), 即归一化高度的平均值; 最大高度(h max ), 即归一化高度的最大值; 最低高度(h min )即归一化高度的最小值; 同时, 为了避免下层植被对冠层分析的干扰, 去除了高度2 m以下点云. ...
Using an Unmanned Aerial Vehicle (UAV) to capture micro- topography of Antarctic moss beds.
1
2014
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
Visualizing and quantifying vineyard canopy LAI using an Unmanned Aerial Vehicle (UAV) collected high density structure from motion point cloud.
1
2013
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
Assessment of tree structure using a 3D image analysis technique—A proof of concept.
1
2014
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data.
2002
基于机载激光雷达的小兴安岭温带森林组分生物量反演
1
2012
... 将DSM与DEM进行差值运算, 获得DCHM, 完成点云数据的归一化.建模数据变量从归一化后的点云中进行提取, 参照LiDAR点云研究成果(Lefsky et al ., 2001 ; Popescu, 2007 ; 刘东起等, 2012 ; 庞勇和李增元, 2012 ), 本研究选取了高度分位数变量组(h 10 、h 25 、h 30 、h 40 、h 60 、h 75 、h 85 、h 90 ), 即森林冠层高度垂直分布的分位数(第10, 25, 30, 40, 60, 75, 85, 90分位数); 密度变量组(d 10 、d 25 、d 30 、d 40 、d 60 、d 75 、d 85 、d 90 ), 即在相应百分位高度等级以上的点云在所有点云中所占的百分比; 平均高度(h avg ), 即归一化高度的平均值; 最大高度(h max ), 即归一化高度的最大值; 最低高度(h min )即归一化高度的最小值; 同时, 为了避免下层植被对冠层分析的干扰, 去除了高度2 m以下点云. ...
基于机载激光雷达的小兴安岭温带森林组分生物量反演
1
2012
... 将DSM与DEM进行差值运算, 获得DCHM, 完成点云数据的归一化.建模数据变量从归一化后的点云中进行提取, 参照LiDAR点云研究成果(Lefsky et al ., 2001 ; Popescu, 2007 ; 刘东起等, 2012 ; 庞勇和李增元, 2012 ), 本研究选取了高度分位数变量组(h 10 、h 25 、h 30 、h 40 、h 60 、h 75 、h 85 、h 90 ), 即森林冠层高度垂直分布的分位数(第10, 25, 30, 40, 60, 75, 85, 90分位数); 密度变量组(d 10 、d 25 、d 30 、d 40 、d 60 、d 75 、d 85 、d 90 ), 即在相应百分位高度等级以上的点云在所有点云中所占的百分比; 平均高度(h avg ), 即归一化高度的平均值; 最大高度(h max ), 即归一化高度的最大值; 最低高度(h min )即归一化高度的最小值; 同时, 为了避免下层植被对冠层分析的干扰, 去除了高度2 m以下点云. ...
激光雷达技术及其在林业上的应用
1
2005
... 林分平均高、平均胸径、林分密度、蓄积量等林分特征变量的精确测定对于森林管理与生态监测具有重要意义(庞勇等, 2005 ).传统的测定方式为人工实地测量, 耗时耗力且只能获取小面积数据, 难以获取区域尺度或更大尺度的信息.遥感方法能快速地获取大面积森林状态信息, 降低人力和物力的消耗, 且在数据的完整性和时间性上具有较高的精度(Wulder et al ., 2010 ).但光学遥感数据主要记录的是森林的水平结构信息, 其遥感信号穿透性较低, 难以有效地反映森林的垂直结构; 且在茂密林地区域, 即使森林具有很高的复杂度和变异度, 表现在遥感图像上的光谱差异也很小, 导致林分特征信息呈现区域性光谱饱和(Duncanson et al ., 2010 ; 李德仁等, 2012 ). ...
激光雷达技术及其在林业上的应用
1
2005
... 林分平均高、平均胸径、林分密度、蓄积量等林分特征变量的精确测定对于森林管理与生态监测具有重要意义(庞勇等, 2005 ).传统的测定方式为人工实地测量, 耗时耗力且只能获取小面积数据, 难以获取区域尺度或更大尺度的信息.遥感方法能快速地获取大面积森林状态信息, 降低人力和物力的消耗, 且在数据的完整性和时间性上具有较高的精度(Wulder et al ., 2010 ).但光学遥感数据主要记录的是森林的水平结构信息, 其遥感信号穿透性较低, 难以有效地反映森林的垂直结构; 且在茂密林地区域, 即使森林具有很高的复杂度和变异度, 表现在遥感图像上的光谱差异也很小, 导致林分特征信息呈现区域性光谱饱和(Duncanson et al ., 2010 ; 李德仁等, 2012 ). ...
Estimating biomass of individual pine trees using airborne LiDAR.
1
2007
... 将DSM与DEM进行差值运算, 获得DCHM, 完成点云数据的归一化.建模数据变量从归一化后的点云中进行提取, 参照LiDAR点云研究成果(Lefsky et al ., 2001 ; Popescu, 2007 ; 刘东起等, 2012 ; 庞勇和李增元, 2012 ), 本研究选取了高度分位数变量组(h 10 、h 25 、h 30 、h 40 、h 60 、h 75 、h 85 、h 90 ), 即森林冠层高度垂直分布的分位数(第10, 25, 30, 40, 60, 75, 85, 90分位数); 密度变量组(d 10 、d 25 、d 30 、d 40 、d 60 、d 75 、d 85 、d 90 ), 即在相应百分位高度等级以上的点云在所有点云中所占的百分比; 平均高度(h avg ), 即归一化高度的平均值; 最大高度(h max ), 即归一化高度的最大值; 最低高度(h min )即归一化高度的最小值; 同时, 为了避免下层植被对冠层分析的干扰, 去除了高度2 m以下点云. ...
An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery based on Structure from Motion (SFM) point clouds
1
2012
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
Development of a UAV-LiDAR system with application to forest inventory.
2012
‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications.
2
2012
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
... ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
Implications of differing input data sources and approaches upon forest carbon stock estimation.
1
2010
... 林分平均高、平均胸径、林分密度、蓄积量等林分特征变量的精确测定对于森林管理与生态监测具有重要意义(庞勇等, 2005 ).传统的测定方式为人工实地测量, 耗时耗力且只能获取小面积数据, 难以获取区域尺度或更大尺度的信息.遥感方法能快速地获取大面积森林状态信息, 降低人力和物力的消耗, 且在数据的完整性和时间性上具有较高的精度(Wulder et al ., 2010 ).但光学遥感数据主要记录的是森林的水平结构信息, 其遥感信号穿透性较低, 难以有效地反映森林的垂直结构; 且在茂密林地区域, 即使森林具有很高的复杂度和变异度, 表现在遥感图像上的光谱差异也很小, 导致林分特征信息呈现区域性光谱饱和(Duncanson et al ., 2010 ; 李德仁等, 2012 ). ...
关于利用七参数法进行WGS-84和BJ-54坐标转换问题的探讨
1
2007
... 点云的归一化指对点云高度处理, 即距离地表的相对高度的获得, 方式由DSM与DEM差值而来, 归一化的结果为数字树冠高层模型(DCHM).由于DSM和DEM二者数据平台不一致, 数据差异性较大, 主要有两点: 1)地理坐标不一致: 由于传感平台不一致, 本研究中UAV影像数据采用wgs84坐标系统, 而LiDAR采用西安80坐标系统.文章采用实地获取的17个典型地物的地面验证点坐标, 参考前人研究成果(蒋小军等, 2010 ; 徐仕琪等, 2007 ), 通过基于布尔莎七参数法的三维坐标差转换模型, 将DEM与DSM坐标统一, 以便叠合运算.2)点云数量有差距: 研究区LiDAR点云数量为22730, 约0.17点·m-2 , UAV影像点云数量为772916, 约5.56点·m-2 ,两者数量差异较大, 通过统一插值为1 m × 1 m栅格数据满足空间运算前提. ...
关于利用七参数法进行WGS-84和BJ-54坐标转换问题的探讨
1
2007
... 点云的归一化指对点云高度处理, 即距离地表的相对高度的获得, 方式由DSM与DEM差值而来, 归一化的结果为数字树冠高层模型(DCHM).由于DSM和DEM二者数据平台不一致, 数据差异性较大, 主要有两点: 1)地理坐标不一致: 由于传感平台不一致, 本研究中UAV影像数据采用wgs84坐标系统, 而LiDAR采用西安80坐标系统.文章采用实地获取的17个典型地物的地面验证点坐标, 参考前人研究成果(蒋小军等, 2010 ; 徐仕琪等, 2007 ), 通过基于布尔莎七参数法的三维坐标差转换模型, 将DEM与DSM坐标统一, 以便叠合运算.2)点云数量有差距: 研究区LiDAR点云数量为22730, 约0.17点·m-2 , UAV影像点云数量为772916, 约5.56点·m-2 ,两者数量差异较大, 通过统一插值为1 m × 1 m栅格数据满足空间运算前提. ...
Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods.
2014
机载激光雷达数据和数码相机影像林木参数提取研究
3
2007
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
... )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
... 利用LiDAR数据生成DEM, DEM是获取相对树高的前提.数据处理的过程包括以下三步: 1)数据预处理, 包括异常点剔除和重叠数据处理, 首先去除高程噪声点, 噪声点分两类, 一类为高程负值点, 一类为高程突变剧烈点.第二类点需参考研究区实际情况进行判断.其次去除LiDAR重叠航带的数据, 由于LiDAR数据是分航带进行的, 需要去除跨带的数据点, 参考赵峰(2007) 提出的方法, 采用以大于激光点云平均间距的平滑滤波进行多次平滑消除重叠带.2)点云数据分类, 将点云数据分为裸地与非裸地两类, 激光点云的分类采用滤波和分类的方法提取裸地(即地形)高程信息, 将生成的裸地点云以点状矢量文件输出, 再与UAV影像叠加进行目视纠正.3) DEM生成, 将分类后的裸地点采用反距离加权法进行1 m × 1 m的插值, 生成DEM. ...
机载激光雷达数据和数码相机影像林木参数提取研究
3
2007
... 激光雷达(LiDAR)是近年来发展迅速的主动遥感技术, 激光雷达通过激光直接照射, 返回三维点云和波形数据, 可用于森林的生物物理特性和冠层结构的精确估算.但激光雷达数据成本高, 较难在林业生产实践中广泛应用(曹林等, 2013 ).近年来, 无人机(UAV)以其在云下低空飞行的能力, 及其低成本和灵活性, 弥补了卫星光学遥感和普通航空摄影易受云层遮挡影响的缺憾, 同时, 也降低了地物三维信息(如点云)的获取成本.Turner等(2012) 就无人机在地理上的应用进行了一些尝试, 结合地面控制点(GCP)获取了南极裸露岩石地面数字高程模型 (DEM).Wallace等(2012) 利用地面控制点结合无人机航摄影像自动生成了大范围海岸沙地的地形点云.Mathews和Jensen (2013) 利用由小斑林地影像生成的点云数据提取了冠层形态, 并获得了不错的可视化效果.Azzari等(2013) 则采用微软的Kinect作为微型无人摄像装置模拟了单木的三维结构, 并进行了单木解析.Morgenroth和Gomez (2014) 利用数字影像生成的三维点云进行了单木树高、树冠、胸径等参数的测定; Lucieer等(2014) 利用UAV影像结合运动到结构(SFM)算法获取了高精度的南极苔藓地貌.Zarco-Tejada等(2014) 利用高分辨率无人机影像对152株橄榄树(Canarium album )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
... )进行了单木树高提取, 结果表明图像的分辨率对提取结果有很大的影响.然而由于无人机目前作为一种较新的技术手段, 以UAV点云为研究主体进行林分特征反演的研究较少, 更多的是将其作为对卫星遥感、LiDAR等传统数据获取手段的补充(赵峰, 2007 ; Harwin & Lucieer, 2012 ; Westoby et al ., 2012 ; Dandois & Ellis, 2013 ). ...
... 利用LiDAR数据生成DEM, DEM是获取相对树高的前提.数据处理的过程包括以下三步: 1)数据预处理, 包括异常点剔除和重叠数据处理, 首先去除高程噪声点, 噪声点分两类, 一类为高程负值点, 一类为高程突变剧烈点.第二类点需参考研究区实际情况进行判断.其次去除LiDAR重叠航带的数据, 由于LiDAR数据是分航带进行的, 需要去除跨带的数据点, 参考赵峰(2007) 提出的方法, 采用以大于激光点云平均间距的平滑滤波进行多次平滑消除重叠带.2)点云数据分类, 将点云数据分为裸地与非裸地两类, 激光点云的分类采用滤波和分类的方法提取裸地(即地形)高程信息, 将生成的裸地点云以点状矢量文件输出, 再与UAV影像叠加进行目视纠正.3) DEM生成, 将分类后的裸地点采用反距离加权法进行1 m × 1 m的插值, 生成DEM. ...
 , 李卫正
, 李卫正








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}